LabVIEW实现深度相机与三维定位实战(上) |
您所在的位置:网站首页 › 地图三维实景labview › LabVIEW实现深度相机与三维定位实战(上) |
LabVIEW实现深度相机与三维定位实战(上)
|
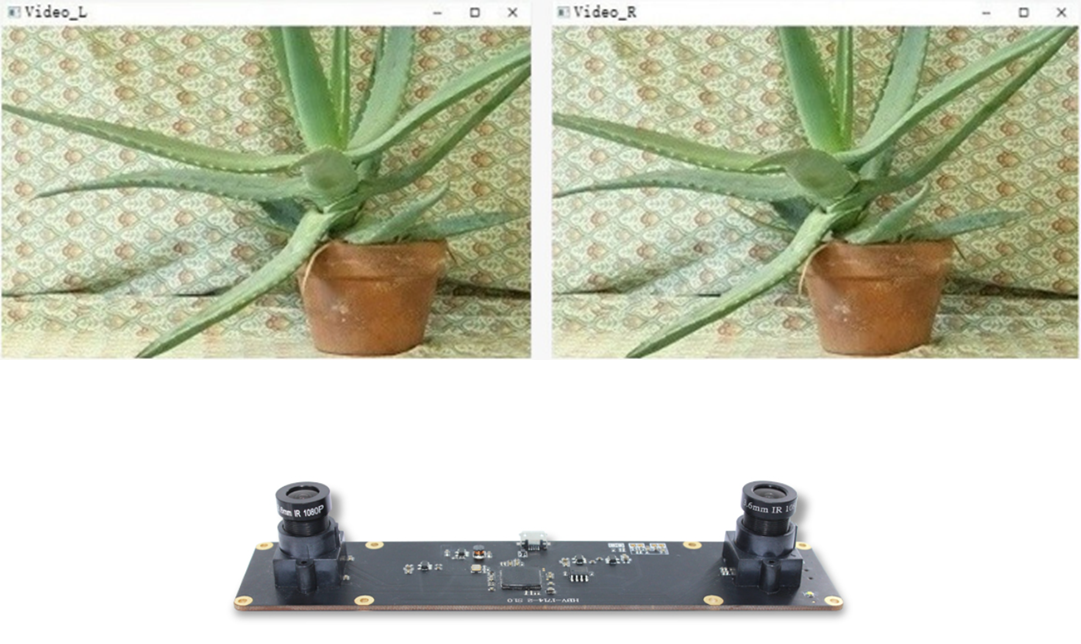
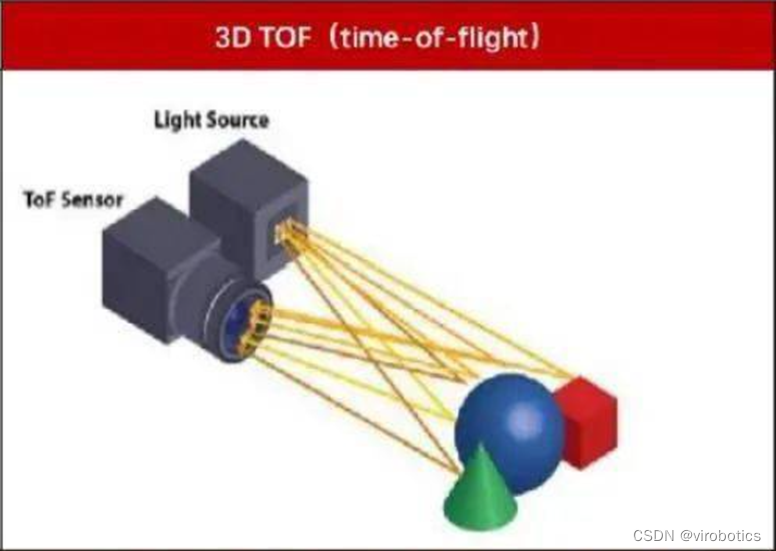
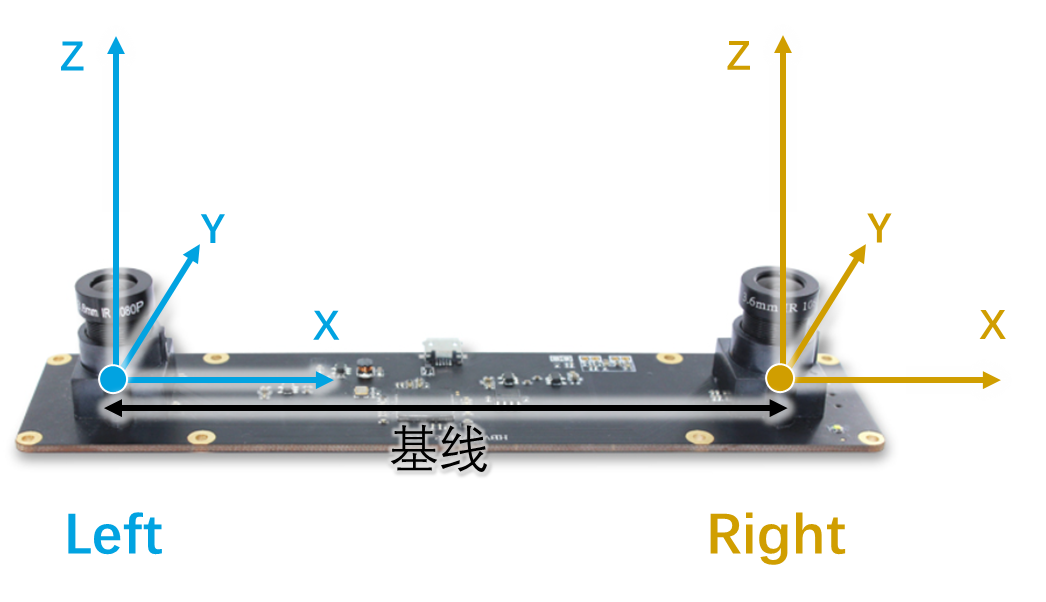
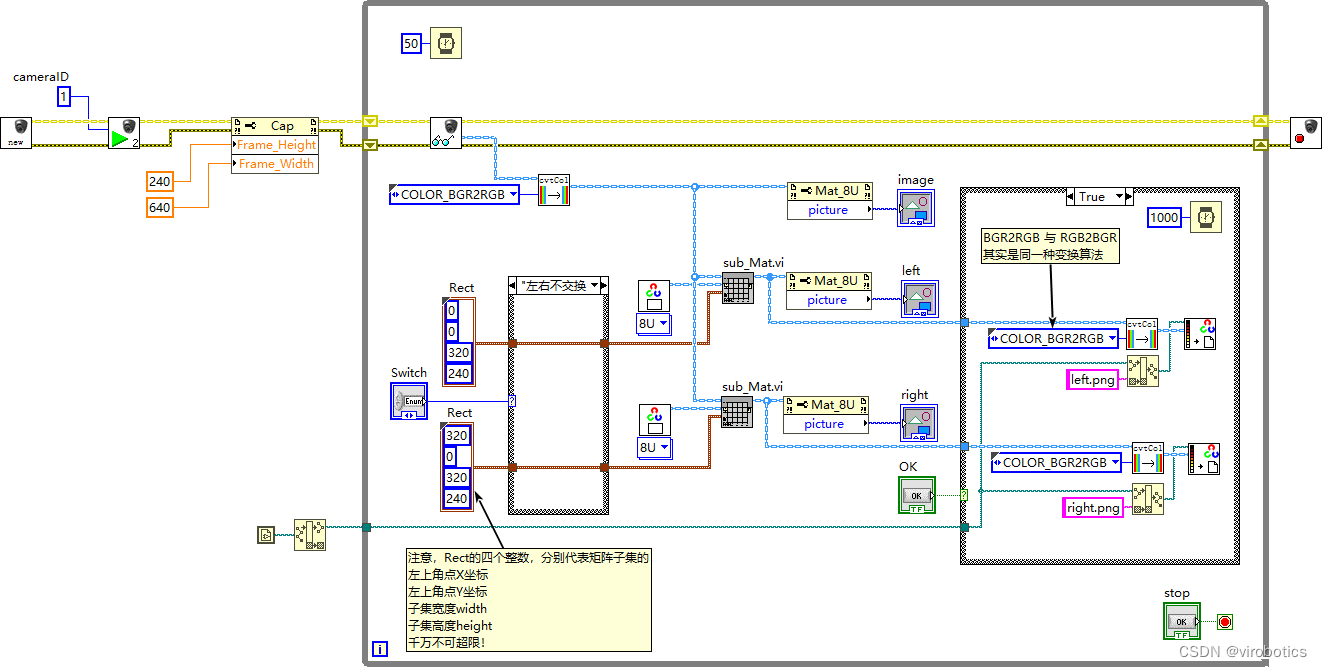
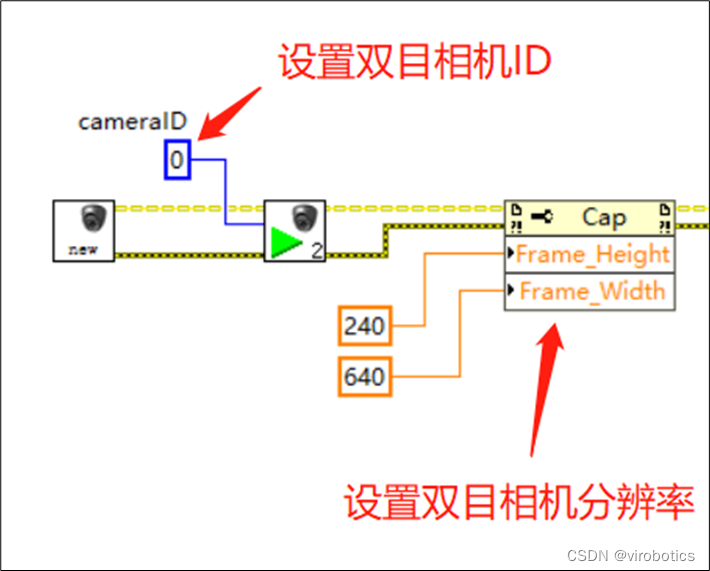
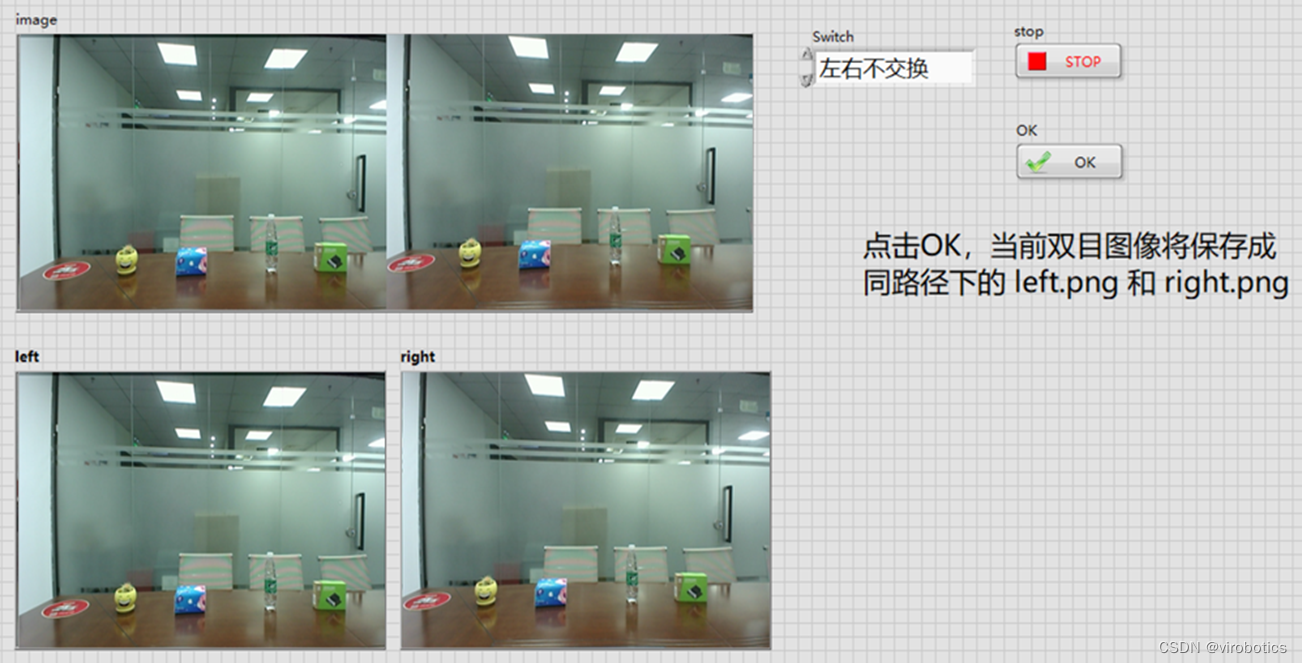
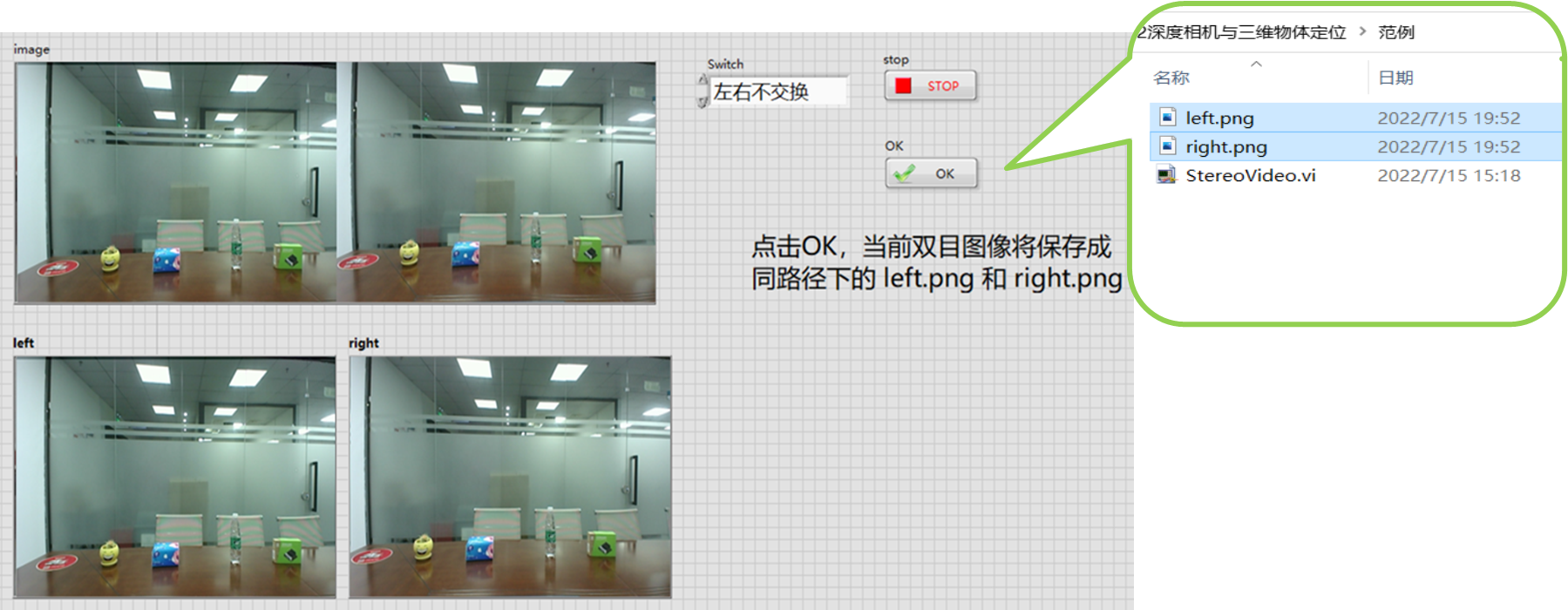
🏡博客主页: virobotics的CSDN博客:LabVIEW深度学习、人工智能博主 🎄所属专栏:『LabVIEW深度学习实战』 🍻上期文章: LabVIEW中使用opencv快速实现视频的读写 📰如觉得博主文章写的不错或对你有所帮助的话,还望大家多多支持呀! 欢迎大家✌关注、👍点赞、✌收藏、👍订阅专栏 文章目录 前言一、多种深度相机及原理二、环境搭建2.1 部署本项目时所用环境2.2 LabVIEW工具包下载及安装 三、双目相机采集图像及原理3.1 双目相机结构3.2 双目图像采集3.3 双目深度测量原理🤗 一个小实验🤔理想双目模型(上)🤔理想双目模型(下)😎分析小实验 四、项目源码总结 前言Hello,大家好,这里是virobotics。今天给大家分享在LabVIEW中实现深度相机与三维定位相关理论知识。 一、多种深度相机及原理1.双目摄像机:获取左右两个RGB图像,通过机器视觉算法,进行“同源点”匹配,从而得到“视差”,计算深度。 2.双目+结构光相机:在双目相机的基础上,主动向物体投射编码激光,并接收发射。这样可以更快、更准确地进行匹配。(因为左右画面中,相同的反射点,就是同源点)经常用于3D人脸识别。 3.ToF深度相机:ToF(Time of flight),即飞行时间法,是一种深度测量的方法,精度为厘米级。其测距原理是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。 双目相机,是由两个相对位置固定的单目摄像头构成。通常,两个摄像头位于同一个拍摄平面,且光轴(Z轴)平行。左右摄像头中心连线称为“基线”。基线与X轴平行,如下图。两个摄像头,除了安装位置不一样,其余相机参数(焦距、分辨率、视角范围等等)均应相同。 任意选取一款市面上流行的“USB免驱”双目摄像机进行实验。其他参数,如:基线长度、镜头焦距、像素数等,请根据实际应用场景进行选型。 本实验以深圳金乾象生产的 KS4A418-D 型号双目相机为例。其基线在38~167mm之间可调。实验前,先固定一种基线长度。 1、第一步: 通过USB数据线,将双目摄像机连到电脑的任意一个USB接口。 2、第二步:打开“范例\StereoVideo.vi” 3、第三步:切换到程序框图,修改cameraID为双目相机对应的ID号。 通常电脑自带的摄像头ID为0,其他外接摄像头ID依次+1。如果电脑没有自带摄像头,那么外接的双目相机的ID就是0。 4、第四步:设置分辨率。通常单目摄像头的分辨率的宽高比为16:9或4:3,那么对应的双目分辨率的宽高比应为32:9或8:3,即宽度增加一倍。 为了方便与后面章节的ACVNet模型对接,这里推荐使用分辨率640*240。 (本实验所用的双目摄像头,可以根据用户设置的分辨率,自动切换单目和双目模式。单目模式只采集Left摄像头画面,双目模式采集Left和Right摄像头拼接的画面) 5、第五步:切换到前面板,运行VI。可以观察到采集的双目画面。VI通过一定的算法,将双目画面分离成Left和Right两张图。(有些型号的双目相机,画面是左右颠倒的,可以将Switch设为“左右交换”予以修正) 6、第六步:点击“OK”,可以将当前的Left和Right画面保存成图片文件。点击“Stop”退出程序。
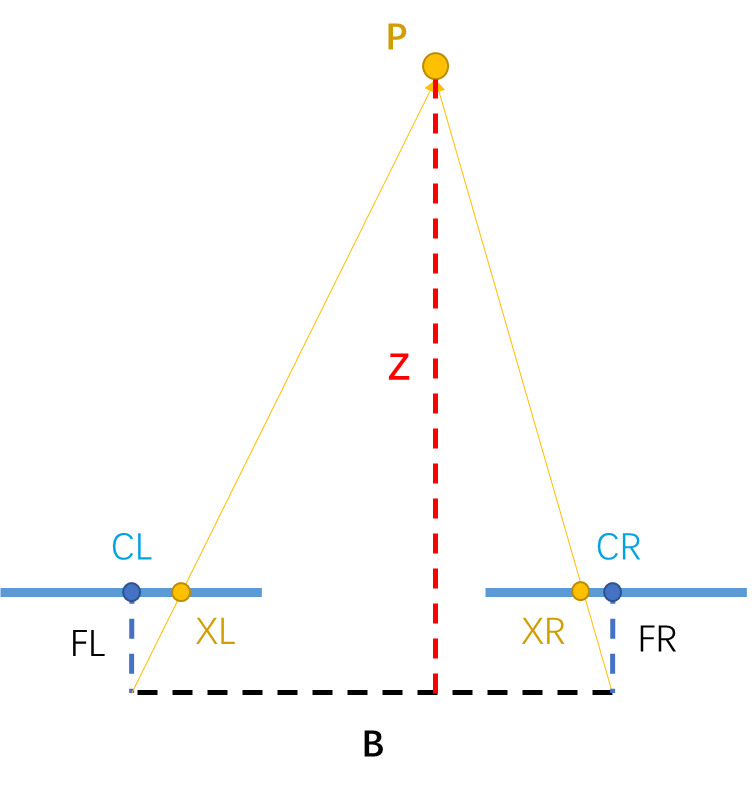
下图所示为点P在理想双目相机模型中的成像原理。 粗体蓝线代表两个相机图像传感器上的靶面(成像平面); B为基线,即两个相机中心点之间的距离; FL与FR分别为左右相机的焦距,理想FL=FR=F; CL与CR分别为左右相机的光心的横坐标(指到靶面左边缘的实际距离,下同),理想CL=CR; XL与XR分别为点P在左右相机靶面上成像点的横坐标; 设点P到双目相机基线的距离(深度)为Z,根据相似三角形定理,可得:
深度计算公式:Z = B*F/(XL - XR) 其中(XL – XR)称为视差,即空间中相同一点在左右相机的靶面上成像点的横坐标之差。可以看出,视差与深度成反比。 注意上述的视差是个实际尺寸,而不是像素横坐标之差,但是在相同的分辨率下,二者成正比。 视差 = 像素横坐标之差 * 像元尺寸 像元尺寸就是单个像素在靶面上的实际尺寸,所以: 像元尺寸 = 靶面尺寸/分辨率 综上,像素横坐标之差 也与深度成反比。我们可以通过固定点的标定实验,直接确定 像素横坐标之差 与深度之间的系数,从而为将来计算深度提供方便。 以左目中心为坐标原点, 则P点空间坐标估算为: Z = B*F/(XL - XR) X = Z*(XL - CL)/F Y = Z*(YL - CL)/F (YL-CL代表投射点与左中心的纵坐标之差,下图中未画出,但原理类似)
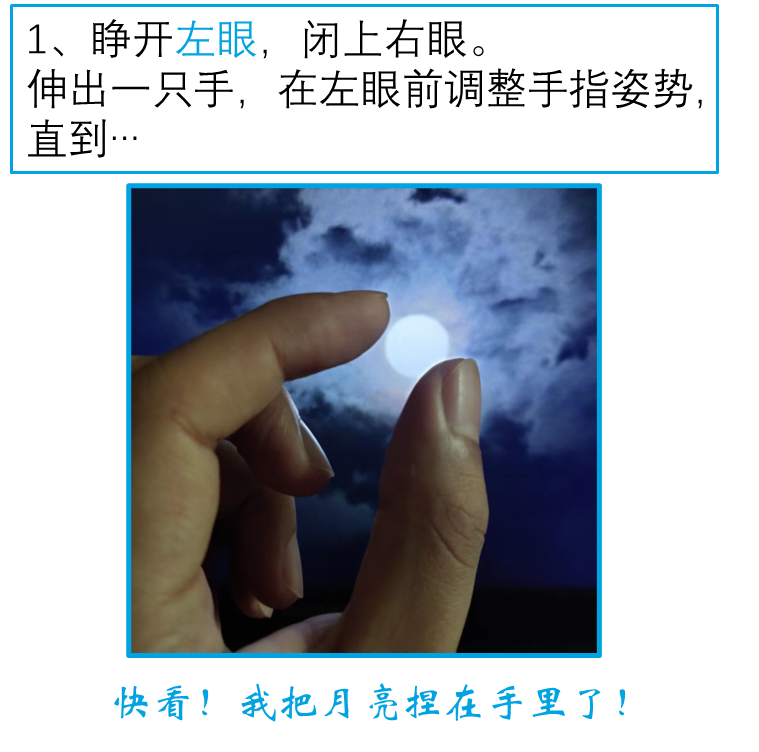
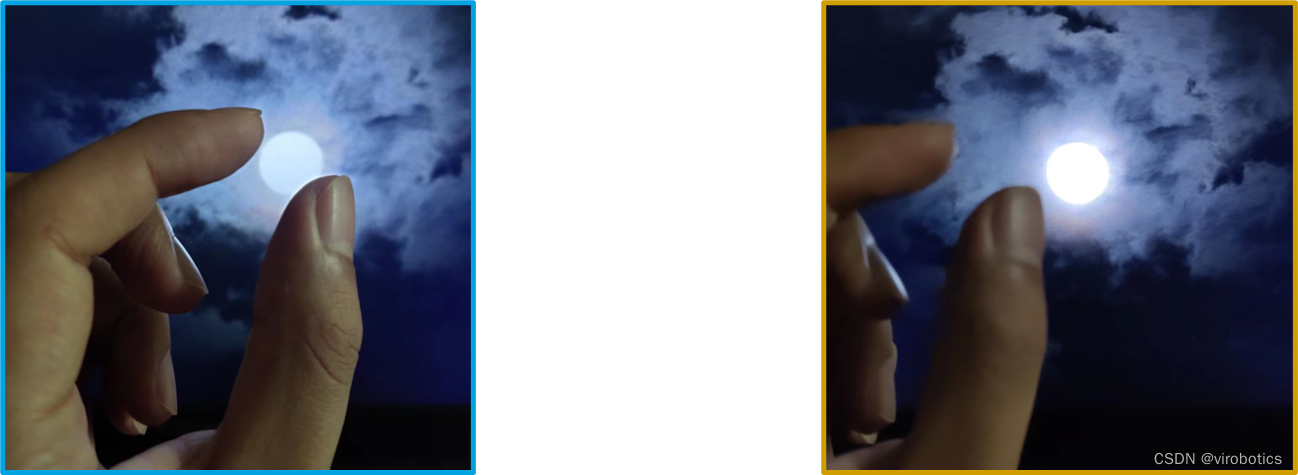
由双目相机的深度计算公式可知,视差与深度成反比。也就是说,远处物体的视差小,近处物体的视差大。所以,当从左眼换到右眼时,月亮在画面中的横坐标几乎没变化,而手指的横坐标却有较大的移动,因而无法继续维持“手捏月亮”的视觉效果。
如需源码,请在一键三联并订阅本专栏后评论区留下邮箱 总结以上就是今天要给大家分享的内容,希望对大家有用。下一篇文章将给大家介绍LabVIEW中实现AVC算法,实现三维定位。我是virobotics,我们下篇文章见~ 如果文章对你有帮助,欢迎✌关注、👍点赞、✌收藏、👍订阅专栏 推荐阅读 LabVIEW图形化的AI视觉开发平台(非NI Vision),大幅降低人工智能开发门槛 LabVIEW图形化的AI视觉开发平台(非NI Vision)VI简介 LabVIEW AI视觉工具包OpenCV Mat基本用法和属性 手把手教你使用LabVIEW人工智能视觉工具包快速实现图像读取与采集 👇技术交流 · 一起学习 · 咨询分享,请联系👇 |


 整理后为:Z = B*F/(XL - XR)
整理后为:Z = B*F/(XL - XR)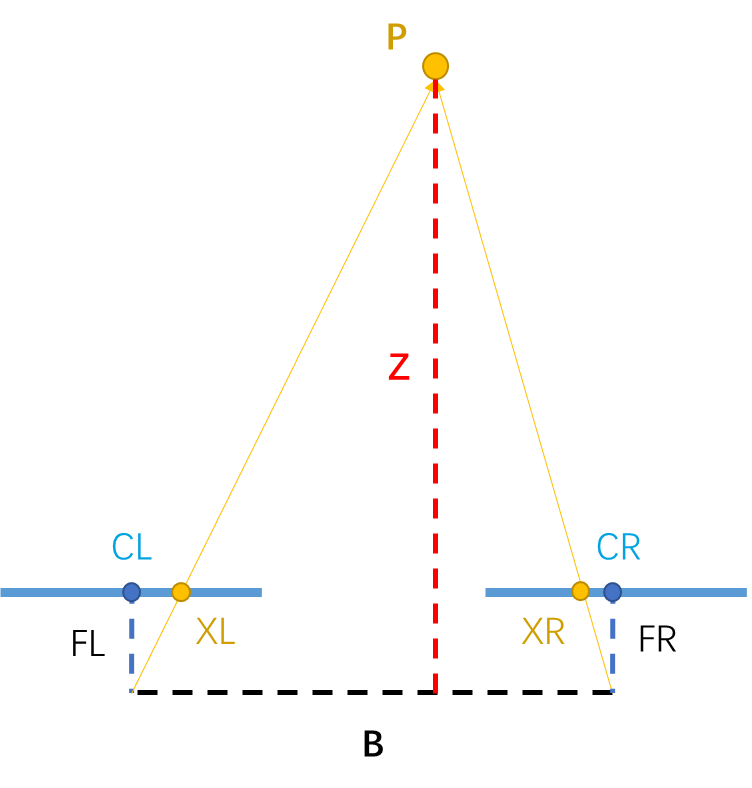
【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |