表面肌电(SEMG)传感器及其放置位置建议 |
您所在的位置:网站首页 › rl电极放置的位置 › 表面肌电(SEMG)传感器及其放置位置建议 |
表面肌电(SEMG)传感器及其放置位置建议
|
表面肌电(SEMG)传感器及其放置位置建议
本文内容来源于SENIAMproject (Surface ElectroMyoGraphy for the Non-Invasive Assessment of Muscles),介绍表面肌电(SEMG)传感器及其放置位置建议。
SEMG 传感器
1 电极形状(ElectrodeShape)
“电极形状”定义为SEMG电极的导电区域的形状。在文献中,据报道矩形(正方形)和圆形(椭圆形)电极都用于SEMG记录。当仅考虑形状差异时(即,将直径为R的圆形电极与方形电极尺寸为R x R进行比较),在性能和拾取面积上不会有太大差异。两个电极的视图将基本相同。只要两个电极的总表面积相同(对于较小的R值就是如此),两个电极的皮肤阻抗将几乎相等,因此从这个意义上讲,也不会产生影响。欧洲学者研究显示直径为10 mm的圆形电极是首选。
SENIAM关于电极形状的建议
SENIAM针对传感器的建议仅限于双极传感器。“电极形状”定义为SEMG电极的导电区域的形状。
SENIAM尚未找到明确,客观的电极形状推荐标准。SEMG用户应清楚说明所用电极的类型,制造和形状。
2 电极尺寸(ElectrodeSize)
“电极尺寸”定义为SEMG电极的导电区域的尺寸。根据文献,在(临床)实践中使用的SEMG电极的尺寸从1mm2到几cm2不等。SEMG电极的尺寸会影响所记录的SEMG。
随着垂直于肌纤维(垂直于肌纤维的条形电极)的尺寸增加,可以预期电极的视野增加。目前尚无有关此影响SEMG特性扩展的定量数据。
可以看出,随着肌纤维方向尺寸的增加,这对SEMG信号具有积分作用,从而增加了检测到的振幅并降低了高频成分。
欧洲inventory表明,最优选电极是直径为10 mm的圆形电极。通常,对于双极型传感器,电极的尺寸应足够大,以能够记录合理的运动单元池,但又要足够小,以避免与其他肌肉产生串扰。
SENIAM关于电极尺寸的建议
SENIAM针对传感器的建议仅限于双极传感器。“电极尺寸”定义为SEMG电极导电区域表面的尺寸。
SENIAM建议在肌肉纤维方向上的电极尺寸最大10毫米。
3 电极间距(Interelectrode distance)
“电极间距”定义为2个双极电极的导电区域之间的中心到中心的距离。
SENIAM关于电极间距离的建议
SENIAM针对传感器的建议仅限于双极传感器。“电极间距离”定义为2个双极电极的导电区域之间的中心到中心的距离。
SENIAM建议在建议的传感器位置周围使用双极SEMG电极,电极之间的距离为20 mm。当双极电极施加在相对较小的肌肉上时,电极间距离不应超过肌肉纤维长度的1/4。以这种方式,可以避免由于肌腱和运动终板的影响而导致的不稳定记录。
4 电极材料(Electrodematerial)
与皮肤形成接触层的电极材料需要实现良好的电极皮肤接触,低的电极皮肤阻抗和及时的“稳定”行为(即关于皮肤界面处的阻抗和化学反应)。研究显示常用不同类型的材料包括:Ag / AgCl,AgCl,Ag,Au等,其中最常用的是Ag / AgCl电极。这些提供了一个稳定的过渡,并且具有相对较低的噪声,并且在大多数市场上都可以买到。
电极大多与电极凝胶结合。两种预胶凝为非胶凝的电极都是可商购的。电极凝胶可用于降低电极皮肤的阻抗。实际上,预胶凝电极和非胶凝电极的性能是可比的。非胶凝电极的使用(必须先胶凝后再施加在肌肉上)非常麻烦且耗时。如果操作不正确,则很可能会破坏SEMG记录。
SENIAM电极材料建议
SENIAM针对传感器的建议仅限于双极传感器。
SENIAM建议使用预胶凝的Ag/AgCl电极。
5 传感器构造(Sensorconstruction)
“传感器结构”定义为:(机械)结构,用于集成电极,电缆和(如果适用)前置放大器。预期构造(及其质量)不会直接影响SEMG特性。但是,仍有一些潜在的间接影响会干扰或污染已记录的SEMG模式: -如果传感器的结构使得IED可以在肌肉收缩期间发生变化,则这将调制动作电位的幅度,形状和宽度,因此将在其幅度和频率特性方面影响肌电信号。 -如果传感器的结构可以使电极和电缆移动,则存在运动伪影的潜在风险(由于电缆的拉扯或结构的惯性)。
SENIAM关于传感器构造的建议
SENIAM针对传感器的建议仅限于双极传感器。“传感器结构”定义为:(机械)结构,用于集成电极,电缆和(如果适用)前置放大器。
SENIAM建议使用重量轻的材料制成固定电极间距离的结构。需要使用(双面)胶带或松紧带固定电缆,以免拉扯产生伪影。 如果在快速动态收缩中传感器构造(由于构造的惯性)导致过多(运动)伪像,SENIAM建议使用(双面)胶带或环固定电极间距离。
放置传感器(Sensor placement)
电极安放位置的选择是表⾯肌电测试的第1步,也是决定测试信号是否可靠的重要环节,因此必须⾼度重视。
⾸先,必须结合运动项⽬特征选取发挥主要作⽤的肌⾁。同时,需要了解所测肌⾁的主要功能和解剖学标记点,这些点对电极安放很有帮助。 其次,需要了解⼈体浅表的主要⼯作肌群的名称及肌纤维的⾛向(决定电极粘贴⽅向)。
人体主要解刨学标记点
浅表肌⾁群的名称及电极安放位置示意图
1 选择SEMG传感器
传感器定义为电极,电极结构和集成前置放大器(如果适用)的集合。选择SEMG传感器时,必须选择传感器的类型,形状,大小,电极间距,材料和结构。传感器类型可以是单极,双极或(一维或二维)阵列。形状可以是圆形,椭圆形,正方形,矩形或针形。尺寸可以从1mm2的表面到几厘米的直径不等,电极间距离从1mm到几厘米不等。可以使用不同类型的电极材料:Ag,AgCl,Ag/AgCl,Au等。
SENIAM有关选择SEMG传感器的建议
“传感器”定义为电极,电极结构和集成前置放大器(如果适用)的集合。针对SEMG传感器的SENIAM建议仅限于双极性传感器:由2个表面电极组成的传感器。对于双极传感器,SENIAM已针对以下方面提出了建议:
-电极形状 -电极尺寸 -电极间距离 -电极材料 -传感器构造
2 皮肤准备(Preparationof the skin)
在选择传感器之后,需要准备患者的皮肤,以便获得良好的电极-皮肤接触。良好的电极-皮肤接触对于获得更好的SEMG记录(就振幅特性而言),越来越少的伪像(电干扰),降低电极之间失衡的风险(降低共模干扰信号)和降低噪音(降低S / N比值)非常重要。正确的皮肤准备对于改善电极与皮肤的接触非常有用。在文献中进行了报道的使用了不同的(多种)皮肤准备技术包括:剃毛,用酒精清洁,用凝胶打磨和用砂纸擦拭。
SENIAM建议准备皮肤
SENIAM准备皮肤的建议如果必须放置电极的皮肤表面被毛发覆盖,则应剃光患者的毛发。
下一步是用酒精清洁皮肤,并使酒精挥发,以便在放置电极之前将皮肤干燥。
3 将患者置于起始姿势(Positioningthe patient in starting posture)
在准备皮肤后,必须将受试者置于开始姿势,该姿势可以确定电极在肌肉上的正确位置。在初始姿势下,可以清晰地(通过触诊)确定有助于确定正确电极位置的肌肉和解剖标志。
SENIAM建议以起始姿势定位患者
起始姿势取决于放置电极的肌肉。针对单个肌肉上传感器位置的SENIAM建议包含针对每个单个肌肉的起始姿势的描述。通常,开始姿势的描述包含对患者姿势(坐着,躺着,俯卧等)的描述,以及放置电极的身体部分的位置和方向。
有关表面肌群开始姿势的建议在稍后的文章中体现。
4 确定传感器位置(Determinationof sensor location)
在将受试者放置在建议的开始姿势之后,可以确定并标记SEMG传感器的位置。“传感器位置”定义为两个双极电极在肌肉上的中心位置。传感器应放置在可以获得良好且稳定的SEMG的位置。影响良好且稳定的SEMG记录的因素有:运动点和/或肌腱的存在,以及SEMG传感器附近其他活动的肌肉(串扰)。
SENIAM有关确定传感器位置的建议
“传感器位置”定义为两个双极电极在肌肉上的中心位置。SENIAM已针对30个单独肌肉上的传感器位置提出了建议。在这些建议中,电极的位置被描述为2个解剖界标之间的线上的点。首先,必须根据SENIAM对传感器位置的建议来定位解剖标志的位置。接下来,需要在2个地标之间绘制一条线。根据SENIAM对单个肌肉的建议,传感器的位置可以位于该直线上的某个位置。这些个别建议基于2条一般建议:
-关于传感器在肌肉上的纵向位置,SENIAM建议将传感器放置在(最)远端运动终板区域和远端肌腱的中间。
-关于传感器在肌肉上的横向位置,SENIAM建议将传感器放置在远离“边缘”的其他细分区域或肌肉的表面,以使肌肉与这些细分区域和其他肌肉的间距最大。
有关单个肌肉的传感器位置的建议包含在后续文章中。
5 传感器的放置和固定(Placementand fixation of the sensor)
确定并标记传感器位置后,需要将电极放置并固定在标记的位置周围。在放置和固定电极时,必须选择电极间的距离,方向,固定方法和参考电极的位置。“电极间距离”定义为2个双极电极的导电区域之间的中心到中心的距离。文献表明电极间距对拾取面积和串扰产生影响。“方向”被定义为两个双极电极之间的线相对于肌纤维方向的位置。从文献中知道,电极的方向对所记录的SEMG具有重要影响。参比电极需要放置在大共模干扰信号风险最小的位置。通常接受的是,参考电极需要放置在无电的组织上。在文献中,根据记录SEMG的肌肉,最好使用多个参考电极位置。
SENIAM有关传感器放置和固定的建议
SENIAM关于电极放置和固定的建议包括以下方面:
电极间距离 “电极间距离”定义为2个双极电极的导电区域之间的中心到中心的距离。
SENIAM建议在推荐的传感器位置周围使用双极SEMG电极,电极之间的距离为20 mm。当双极电极施加在相对较小的肌肉上时,电极间距离不应超过肌纤维长度的1/4。以这种方式,可以避免由于肌腱和运动终板的影响而导致的不稳定记录。
电极方向 “电极定向”定义为两个双极电极之间的线相对于肌纤维方向的位置。
SENIAM建议将双极SEMG电极放置在推荐的传感器位置周围,并使其方向平行于肌纤维。
固定在皮肤上 SENIAM建议使用松紧带或(双面)胶带/环将电极(结构)和电缆固定在皮肤上,使电极正确固定在皮肤上,不妨碍移动,并且电缆不拉动电极(结构)。
参比电极的位置 根据不同的应用,SENIAM建议使用手腕,C7的棘突或脚踝作为参考电极的标准位置。
针对单个肌肉的传感器位置的建议包括针对每个单个肌肉的电极间距离,双极SEMG电极的方向以及参考电极的位置的建议。这些建议可以在本公众号后续的文章中找到。
6 连接测试(Testingof the connection)
放置并固定电极后,可以将电极(包括参比电极)连接到SEMG设备,并可以进行临床测试以测试电极是否已正确放置在肌肉上并已连接到设备,从而使电极可以记录可靠的SEMG信号。临床测试保证(在正常情况下)被测肌肉的活动。
SENIAM有关连接测试的建议
SENIAM建议对每条肌肉进行临床测试。所描述的临床测试是公认的肌肉测试,可以保证(在正常情况下)被测肌肉的活动。临床测试必须从SENIAM建议中描述的传感器位置的起始姿势开始,并且必须根据建议进行。所描述的临床测试不是“选择性”收缩,其中只有所需的肌肉处于活动状态,而所有其他肌肉均处于非活动状态。
7 有关单个肌肉上传感器位置的建议(Sensor Locations)
SENIAM已针对30个单独肌肉上的传感器位置提出了建议。
对于每一块肌肉,建议包括肌肉解剖的描述(细分、起始点、功能)、表面肌电传感器建议的描述、电极位置和方向的描述以及记录该特定肌肉表面肌电的起始姿势和临床试验的描述。SENIAM针对个别肌肉传感器位置的建议包括以下身体部位:
-肩和颈 (1)斜方肌上部 肌群 名称 斜方肌 细分 斜方肌下行(上部) 肌肉解剖学 起点枕外隆起,颈项上线内侧1/3,颈项韧带,第7颈椎棘突。 止点锁骨外侧1/3和肩胛骨肩峰 功能起点固定:稳定肩胛骨内收(与下部肌纤维一起)(主要由横纤维进行)。 肩胛骨的旋转使肩胛盂腔面向头颅(与下行纤维一起进行,由横向纤维稳定)。 此外,下行肌纤维抬高肩胛骨。当止点固定并单向作用时,下行纤维伸展、横向弯曲并旋转颈椎的头部和关节,使面部朝相反的方向旋转。随着止点固定和作用的双边下行斜方肌伸展头部和颈部。 建议的传感器放置步骤 起始姿势坐直,双臂垂直悬垂。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置电极需要放置在椎骨C7上从肩峰到脊柱的线上的50%处。 -方向在脊椎C7上的肩峰和脊椎之间的直线方向上。 -皮肤固定(双面)胶带/环。 -参比电极在C7的棘突上或手腕上/周围。 临床测试抬高锁骨和肩胛骨的肩峰端;头部和颈部向抬高的肩部伸展和旋转,面部朝相反方向旋转。在肩部向肩部施加压力,并在向前弯曲的方向上抵住头部。 定位
(2)斜方肌中部 肌群 名称 斜方肌 细分 斜方肌中部 肌肉解剖学 起点第一至第五胸椎的棘突。 止点肩胛骨脊柱的上唇。 功能起点固定:横向纤维主要进行肩胛骨内收(通过下行和上行纤维稳定)。 肩胛骨旋转的稳定性,使肩胛骨腔面向颅骨。 建议的传感器放置步骤 起始姿势坐直,双臂垂直悬垂。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置电极需要放置在肩胛骨和脊柱中间边缘之间的50%,在T3水平位置。 -方向在T5和肩峰之间的直线方向。 -皮肤固定(双面)胶带/环。 -参比电极在C7的棘突上或手腕上/周围。 临床测试肘部伸肌和肩后肌必须给予必要的固定,以使用手臂作为杠杆。肩胛骨从旋转位置内收,在这个位置下角是侧向旋转的。为了获得肩胛骨的这个位置并获得测试的杠杆作用,肘关节需要伸展,肩关节需要呈90度外展和侧向旋转。肩部的旋转由手掌朝着头骨的手的位置表示(不抬高肩带)。 定位
(3)斜方肌下部 肌群 名称 斜方肌 细分 斜方肌下部 肌肉解剖学 起点第六至第十二胸椎的棘突。 止点肩胛骨的顶点。 功能起点固定:稳定肩胛骨内收(与下行纤维一起)(主要由横纤维进行)。 肩胛骨的旋转使肩胛盂腔面向头颅(与下行纤维一起进行,由横向纤维稳定)。 此外,上行的肌纤维压迫肩胛骨。 建议的传感器放置步骤 起始姿势坐直,双臂垂直悬垂。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置电极需要放置在从肩胛冈到第8胸椎的直线上的2/3处。 -方向在T8和肩峰之间的直线方向。 -皮肤固定(双面)胶带/环。 -参比电极在C7的棘突上或手腕上/周围。 临床测试注意肘部伸肌和肩部肌肉给予必要的固定,以便在本试验中使用手臂作为杠杆。肩胛骨凹陷,下角侧向旋转,肩胛骨内收。为了获得肩胛骨的这个位置,以强调上行纤维的作用,并获得测试的杠杆作用,手臂斜放在头顶上,肩部侧向旋转。向下按压前臂。 定位
(4)三角肌前部 肌群 名称 三角肌 细分 前部 肌肉解剖学 起点前缘,上表面,锁骨外侧1/3。 止点肱骨三角肌粗隆。 功能
肩关节外展,主要由中部纤维完成,由前后纤维稳定。此外,前纤维弯曲并内侧旋转肩关节。 建议的传感器放置步骤 起始姿势双臂垂直悬垂,手掌向内。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置电极需要放置在肩峰远端和前方的一个手指宽度处。 -方向 在肩峰和拇指之间的直线方向。 -皮肤固定(双面)胶带/环。 -参比电极在C7的棘突上或手腕上/周围。 临床测试肩外展轻微屈曲,肱骨轻微旋转。在直立坐姿时,有必要将肱骨稍微侧向旋转,以增加重力对前纤维的影响。三角肌前部的解剖活动需要轻微的内侧旋转,同时向手臂的前内侧面施加压力,使其朝内收和轻微伸展的方向运动。 定位
(5)三角肌中部 肌群 名称 三角肌 细分 中部 肌肉解剖学 起点肩峰的侧缘和上表面。 止点肱骨三角肌粗隆。 功能
三角肌中部可进行肩关节外展,并通过前、后纤维稳定。 建议的传感器放置步骤 起始姿势以躯干相对于手臂的位置坐着,这样稳定的躯干就不需要进一步的稳定。如果肩胛骨固定肌肉薄弱,肩胛骨必须稳定。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置
电极需要从肩峰到肘关节外侧上髁放置。这应该与肌肉最大的隆起相对应。 -方向 在肩峰和手之间的直线方向。 -皮肤固定(双面)胶带/环。 -参比电极在C7的棘突上或手腕上/周围。 临床测试手臂应外展,不得旋转。将肩膀置于测试位置时,应弯曲肘部以指示旋转的中立位置,但可以在确定肩膀位置后将其伸展,以便将伸展的四肢用于更长的杠杆。如果肘部弯曲,则需要向肱骨远端的背面施加压力,如果肘部伸展,则需要对前臂施加压力。 定位
(6)三角肌后部 肌群 名称 三角肌 细分 后部 肌肉解剖学 起点肩胛骨脊柱后缘下唇。 止点肱骨三角肌粗隆。 功能
肩关节外展,主要由中间纤维完成,由前后纤维稳定。此外,后纤维伸展并侧向旋转。 建议的传感器放置步骤 起始姿势坐直,双臂垂直悬挂,手掌向内指向。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置
将电极放在肩峰角后大约两指的区域中心。 -方向 在肩峰和小指之间的直线方向。 -皮肤固定(双面)胶带/环。 -参比电极在C7的棘突上或手腕上/周围。 临床测试稍微伸展肩膀,肱骨轻微内旋。肱骨处于轻微的内侧旋转,以使后纤维处于反重力位置。解剖动作需要轻微的侧向旋转,同时向内臂的后外侧表面沿内收和轻微弯曲的方向施加压力。 定位
-躯干或(下部)后背 (1)竖脊肌最长肌 肌群 名称竖脊肌 细分 最长肌 肌肉解剖学 起点腰段与髂腰段、腰椎横突和副突后表面、胸腰椎筋膜前层融为一体。 止点通过肌腱进入所有胸椎横突的尖端,通过肉质的指状突起在结节和角之间的9或10根肋骨下方。 功能躯干伸 建议的传感器放置步骤 起始姿势 俯卧位,腰椎轻微弯曲。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20 mm 电极放置 -位置 电极需要放置在距L1棘突2指宽的外侧。 -方向 垂直 -皮肤固定 (双面)胶带/环。 -参比电极 在C7的棘突上。 临床测试 从俯卧位置抬起躯干。 定位
(2)竖脊肌髂肋肌 肌群 名称竖脊肌 细分髂肋肌 肌肉解剖学 起点附着于骶骨内侧嵴的阔肌腱前表面、腰椎棘突和第11、12胸椎棘突、髂嵴内侧唇后部、棘上韧带和骶骨外侧嵴。 止点通过肌腱进入下6或7肋角的下缘。 功能伸展,侧向约束(单侧活动) 建议的传感器放置步骤 起始姿势 俯卧位,腰椎轻微弯曲。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20 mm 电极放置 -位置 电极需要放置在从髂后棘到下肋骨最低点的直线中间1指宽的L2水平。 -方向 在髂后棘上肋和下肋最低点之间的直线方向。 -皮肤固定 (双面)胶带/环。 -参比电极 在C7的棘突上。 临床测试 从俯卧位置抬起躯干。 定位
(3)多裂肌 肌群 名称多裂肌 细分 肌肉解剖学 起点L1-L5棘突。 止点 L4-S1乳突 髂骨,骶骨背表面。 功能躯干伸 建议的传感器放置步骤 起始姿势 俯卧位,腰椎轻微弯曲。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20 mm 电极放置 -位置 电极需要放置在髂后棘尾尖到L5棘突水平L1和L2间隙上方(即距中线约2-3cm)的线上并与之对齐。 -方向 在上述线路的方向。 -皮肤固定 (双面)胶带/环。 -参比电极 在C7的棘突上。 临床测试 从俯卧位置抬起躯干。 定位
-上肢 (1)肱二头肌 肌群名称 肱二头肌 细分 短头和长头 肌肉解剖学 起点 短头:肩胛骨喙突的前端。 长头:肩胛骨盂上结节。 止点 桡骨肱二头肌腱膜粗隆(肱二头肌腱膜)。 功能 肘关节屈曲。 建议的传感器放置步骤 起始姿势 坐在椅子上,肘部弯曲成直角,前臂背侧水平向下。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置 电极需要放置在肩峰内侧和肘窝之间的直线上,距离肘窝1/3。 -方向 在肩峰和肘窝之间的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极 手腕上/手腕周围。 临床测试 将一只手放在肘部下方,以缓冲桌上的压力,并将肘部稍微向下弯曲或以直角弯曲,前臂处于旋后状态。沿伸展方向按压前臂。 定位
(2) 肱三头肌长头 肌群名称 肱三头肌 细分 长头 肌肉解剖学 起点 肩胛盂下结节。 止点 尺骨鹰嘴突后表面和前臂筋膜。 功能 肘关节伸展。长头也会内收,可能有助于肩关节的伸展。 建议的传感器放置步骤 起始姿势 坐位,在肩上约90度外展与手臂90度弯曲,手掌向下。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置 电极需要放置在肩峰后嵴和鹰嘴之间的50%线上,在该线中间2指宽处。 -方向 在肩峰后嵴和鹰嘴之间的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极 手腕上/手腕周围。 临床测试 在屈挠方向向前臂施加压力时,伸展肘关节。 定位
(3)肱三头肌外侧头 肌群名称 肱三头肌 细分 外侧头 肌肉解剖学 起点 肱骨近端和外侧肌间隔的1/2侧和后表面。 止点 尺骨鹰嘴突后表面和前臂筋膜。 功能 肘关节伸展。 建议的传感器放置步骤 起始姿势 坐位,在肩上约90度外展,手臂弯曲90度,手掌向下。 电极尺寸 肌纤维方向的最大尺寸:10毫米。 电极距离 20mm电极放置 -位置 电极需要放置在肩峰后嵴和鹰嘴之间的线的50%,在线的外侧2指宽处。 -方向 在肩峰后嵴和鹰嘴突之间的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极 手腕上/手腕周围。 临床测试 在屈挠方向向前臂施加压力时,伸展肘关节。 定位
(4)拇短展肌 肌群名称 拇短展肌 细分 肌肉解剖学 起点 屈肌支持带、斜方骨结节、舟骨结节。 止点 桡侧拇指和伸肌伸展近端指骨的根部。 功能 在垂直于手掌平面的腹侧方向外展拇指的腕掌关节和掌指关节。通过其附着于伸肌背侧的伸展,可延伸拇指指间关节。有助于对抗,并有助于掌指关节的屈曲。 建议的传感器放置步骤 起始姿势 坐着或仰卧,手背稳定在桌子上。 电极尺寸 等长收缩:肌纤维方向最大尺寸:5毫米。 动态收缩:肌肉纤维方向的最大尺寸:2毫米。 电极距离 等长收缩:7.5毫米。 动态收缩:5毫米。 电极放置 -位置 第1掌骨远端1/4的稍内侧。 -方向 与第一掌骨平行。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极 手腕上/手腕周围。 临床测试 将拇指从手掌向右拐,同时向手掌方向施加近侧指骨的压力。 定位
-臀部和大腿
(1)臀肌 肌群 名称 臀肌 细分 臀大肌 肌肉解剖学 起点 髂骨翼外面,骶、尾骨背面及骶结节韧带。 止点 股骨臀肌粗隆和髂胫束。 功能近固定使大腿在髋关节处伸和旋外;肌肉的上半部收缩可使大腿外展、下半部收缩可使大腿内收。 远固定一侧收缩,使骨盆转向对侧。两侧同时收缩使骨盆后倾。并使躯干后伸,维持身体站立的平衡。 建议的传感器放置步骤 起始姿势俯卧,爬在桌子上。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极距离20 mm 电极放置 -位置 电极需要放置在骶骨和大转子之间50%的线上。这个位置对应于臀部中间最突出的位置,远高于大转子可见的凸起。 -方向 从髂后上棘到大腿后侧中间的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极 在C7的棘突上或手腕上/周围或脚踝上/周围。 临床测试 克服手动阻力抬起整条腿。 定位
(2)臀中肌 肌群 名称 臀肌 细分 臀中肌 肌肉解剖学 起点 髂骨翼外面。 止点 股骨大转子。 功能近固定时,使髋关节外展;前部使髋关节屈和内旋。后部使髋关节伸和外旋。远固定时,一侧收缩使骨盆向同侧倾;两侧前部肌纤维收缩,使骨盆前倾,后部肌纤维收缩使骨盆后倾。 建议的传感器放置步骤 起始姿势侧卧在桌子上。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极距离20 mm 电极放置 -位置电极需要放置在髂嵴到大转子连线的50%处。 -方向从髂嵴到大转子的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极 在C7的棘突上或手腕上/周围或脚踝上/周围。 临床测试侧卧,双腿伸开,对抗手动阻力。 定位
(3)阔筋膜张肌 肌群 名称 臀肌 细分 阔筋膜张肌 肌肉解剖学 起点髂前上棘。 止点 胫骨外侧髁。 功能髋关节内收、内旋和屈曲,紧张大腿外侧的髂胫束,有助于膝关节伸展。 建议的传感器放置步骤 起始姿势侧卧在桌子上。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极距离20 mm 电极放置 -位置从髂前棘线到股骨外侧髁上近端1/6。 -方向从髂前棘到股骨外侧髁的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极 手腕上/周围。 临床测试抬起并外展腿部,以抵抗手动阻力。 定位
(4)股直肌 肌群 名称 股四头肌 细分 股直肌 肌肉解剖学 起点 髂前下棘和髋臼上缘。 止点 胫骨上端前面的胫骨粗隆。 功能膝关节伸和髋关节屈。 建议的传感器放置步骤 起始姿势坐在桌子上,膝盖轻微弯曲,上身稍微向后弯曲。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极距离20 mm 电极放置 -位置电极需要放置在髂前棘到髌骨上半部连线的50%。 -方向从髂前棘到髌骨上部的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试伸膝而不旋转大腿,同时向小腿施加阻力。 定位
(5)股内侧肌 肌群 名称 股四头肌 细分 股内侧肌 肌肉解剖学 起点股骨粗隆间线的远端半部分、副翼的内侧唇、内侧髁上线的近端、内收肌和内收肌的肌腱和内侧肌间隔。 止点髌骨的近端和髌骨韧带。 功能膝关节伸。 建议的传感器放置步骤 起始姿势坐在桌子上,膝盖轻微弯曲,上身稍微向后弯曲。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极距离20 mm 电极放置 -位置电极需要放置在髂前上棘与内侧韧带前缘关节间隙之间80%的位置。 -方向几乎垂直于髂前上棘与内侧韧带前缘关节间隙之间的线。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试伸膝而不旋转大腿,同时向小腿施加阻力。 定位
(6)股外侧肌 肌群 名称 股四头肌 细分 股外侧肌 肌肉解剖学 起点股骨粗隆间近端、大转子前下缘、臀粗隆外侧唇、坐骨近侧唇半侧、外侧肌间隔。 止点髌骨的近端和髌骨韧带。 功能膝关节伸。 建议的传感器放置步骤 起始姿势坐在桌子上,膝盖轻微弯曲,上身稍微向后弯曲。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极距离20 mm 电极放置 -位置电极需要放置在从髂前棘到髌骨外侧的2/3线上。 -方向在肌纤维的方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试伸膝而不旋转大腿,同时向小腿施加阻力。 定位
(7)股二头肌 肌群 名称 股二头肌 细分 长头和短头 肌肉解剖学 起点长头起自坐骨结节。 短头起自股骨粗线外侧唇下部。 止点腓骨头外侧,胫骨外侧髁,小腿外侧深筋膜。 功能屈膝关节、伸髋关节。屈膝时,可使小腿旋外。 建议的传感器放置步骤 起始姿势俯卧,面朝下,大腿放在桌子上,膝盖弯曲(小于90度),大腿轻微侧向旋转,腿相对于大腿轻微侧向旋转。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极距离20 mm 电极放置 -位置电极需要放置在坐骨结节和胫骨外侧上髁之间50%的位置。 -方向
在坐骨结节和胫骨外侧上髁之间的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试在膝关节伸展的方向上按压靠近踝关节的腿。 定位
(8)半腱肌 肌群 名称 半腱肌 细分 肌肉解剖学 起点坐骨结节。 止点胫骨上端的内侧。 功能固定时,使大腿在髋关节处伸,小腿在膝关节处屈和内旋。远固定时,其功能与股二头肌相同。 建议的传感器放置步骤 起始姿势俯卧,面朝下,大腿放在桌子上,内侧旋转,腿相对于大腿内侧旋转。膝关节需要弯曲到90度以下。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极距离20 mm 电极放置 -位置
电极需要放置在坐骨结节和胫骨内上髁之间50%的位置。 -方向在坐骨结节和胫骨内侧上髁之间的直线方向。 -皮肤固定 (双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试在膝关节伸展的方向上按压靠近踝关节的腿。 定位
-小腿和脚 (1)胫骨前肌 肌群 名称 胫骨前肌 细分 肌肉解剖学 起点外侧髁和胫骨外侧近端1/2,软骨膜,深筋膜和外侧肌间隔。 止点内侧楔骨内侧面和第1跖骨底。 功能踝关节背屈并协助足内翻。 建议的传感器放置步骤 起始姿势仰卧或坐着。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极间距20 mm 电极放置 -位置电极需要放置在腓骨尖和内踝尖之间的1/3线上。 -方向在腓骨尖和内踝尖之间的直线方向。 -皮肤固定(双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试
在踝关节正上方支撑腿,踝关节背屈,脚倒置,不伸展大脚趾。沿踝关节足底屈曲和足部外翻方向,对足部内侧、背表面施加阻力。 定位
(2)腓骨长肌 肌群 名称 腓骨长肌 细分 肌肉解剖学 起点腓骨外侧面上2/3和胫骨外侧髁。 止点
内侧契骨和第一跖骨的基底部。 功能足外翻,有助于踝关节的足底屈曲。 建议的传感器放置步骤 起始姿势四肢中立位旋转坐着。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极间距20 mm 电极放置 -位置电极需要放置在腓骨顶端到外踝顶端之间的25%线上。 -方向腓骨头端到外踝端之间的直线方向。 -皮肤固定(双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试将腿支撑在踝关节上方。在足底外侧边缘和足底施加阻力时,足踝部足底弯曲,在足部倒转和踝关节背屈的方向上施加阻力。 定位
(3)腓骨短肌 肌群 名称 腓骨短肌 细分 肌肉解剖学 起点腓骨远端2/3的外侧缘。 止点
第5跖骨外侧的结节处。 功能足外翻,有助于踝关节跖屈。 建议的传感器放置步骤 起始姿势四肢中立位旋转坐着。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极间距20 mm 电极放置 -位置电极需要放在腓骨长肌肌腱的前面,从外踝顶端到腓骨头的距离为25%。 -方向从外踝尖到腓骨头的直线方向。 -皮肤固定(双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试将腿支撑在踝关节上方。在足底外侧边缘和足底施加阻力时,足踝部足底弯曲,在足部倒转和踝关节背屈的方向上施加阻力。 注意 由于主要部分被其他肌肉覆盖,因此很难从表面进入腓骨短腓肌。避免指趾外侧肌串扰/重叠。 定位
(4)比目鱼肌 肌群 名称 比目鱼肌 细分 肌肉解剖学 起点腓骨头和腓骨干上1/3的后面,胫骨比目鱼肌线。 止点
经跟腱止于跟骨后面。 功能踝关节跖屈。 建议的传感器放置步骤 起始姿势膝关节弯曲大约90度,将被调查腿的脚后跟/脚放在地板上。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极间距20 mm 电极放置 -位置电极需要放置在股骨内侧髁到内踝之间的2/3处。 -方向从内侧髁到内踝的直线方向。 -皮肤固定(双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试将手放在膝盖上,保持/推动膝盖向下,同时要求受试者/患者将脚后跟抬离地面。 定位
(5)腓肠肌内侧头 肌群 名称 腓肠肌 细分 内侧头 肌肉解剖学 起点
股骨内侧髁后面。 止点
经跟腱止于跟骨后面。 功能踝关节屈曲并协助膝关节屈曲。 建议的传感器放置步骤 起始姿势俯卧,脸朝下,膝盖伸展,脚伸出桌子的末端。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极间距20 mm 电极放置 -位置电极需要放在肌肉最突出的隆起处。 -方向腿的方向(见图)。 -皮肤固定(双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试脚的足底屈曲侧重于向上拉动脚跟,而不是将前脚向下推。为了在该位置获得最大阻力,必须对前脚和跟骨施加压力。 定位
(6)腓肠肌外侧头 肌群 名称 腓肠肌 细分 外侧头 肌肉解剖学 起点
股骨内侧髁后面。 止点
经跟腱止于跟骨后面。 功能踝关节屈曲并协助膝关节屈曲。 建议的传感器放置步骤 起始姿势俯卧,脸朝下,膝盖伸展,脚伸出桌子的末端。 电极尺寸肌肉纤维方向的最大尺寸:10毫米。 电极间距20 mm 电极放置 -位置电极需要放置在腓骨头部和脚跟之间的1/3处。 -方向在腓骨头部和脚跟之间的直线方向。 -皮肤固定(双面)胶带/环或松紧带。 -参比电极脚踝上/周围或C7棘突。 临床测试脚的足底屈曲侧重于向上拉动脚跟,而不是将前脚向下推。为了在该位置获得最大阻力,必须对前脚和跟骨施加压力。 定位
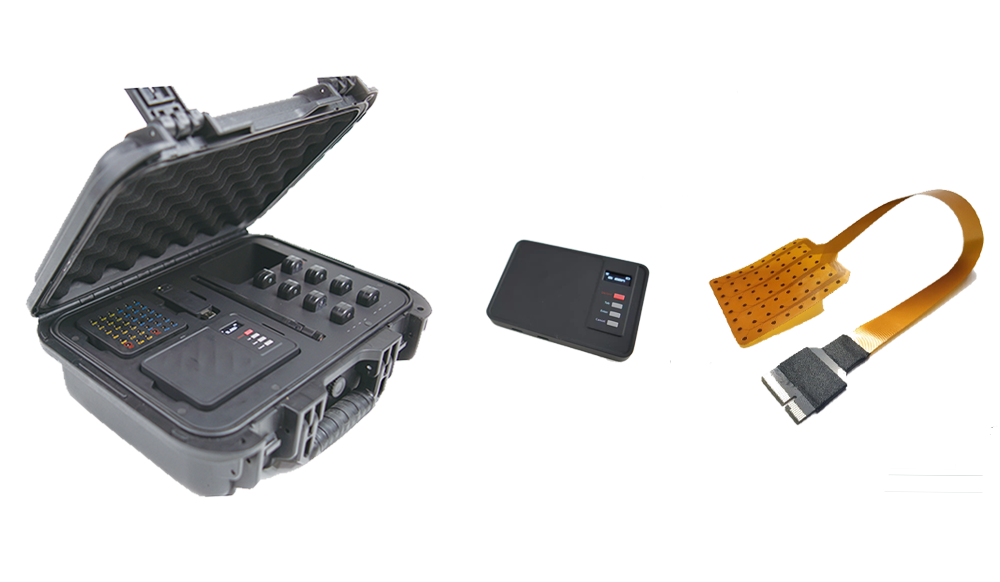
便携式无线表面肌电解决方案
便携式无线肌电测试系统由 64 通道(最大支持256通道)无线高密度肌电信号采集系统、分布式无线肌电测试系统以及专用分析软件组成。能进行肌电信号采集,具备在运动条件下测量数据的能力,具有良好的兼容性与扩展性且支持离线采集。该系统可广泛应用于人机交互、脑机接口、虚拟现实、智能假肢、康复医疗以及运动训练等领域。
丰富的配件
分布式多通道常规肌电图,每组4、8、16通道传感器(最大256通道)
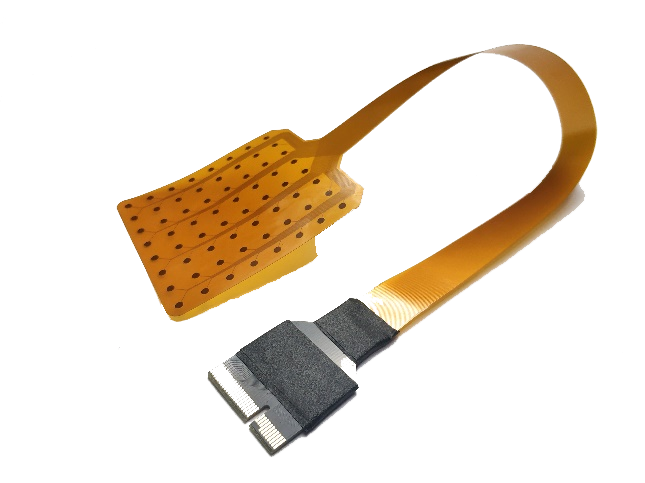
32/64 通道 8 x 8 HD-EMG 网格可以根据客户需求定制不同的电极间距电极片(8mm / 10mm / ...)传感器
分散式高密度肌电,每组4、8、16通道传感器(最大256通道)
可重复使用 4 / 8 / 16 / 32 / 64通道高密度织物肌电传感器(支持定制)
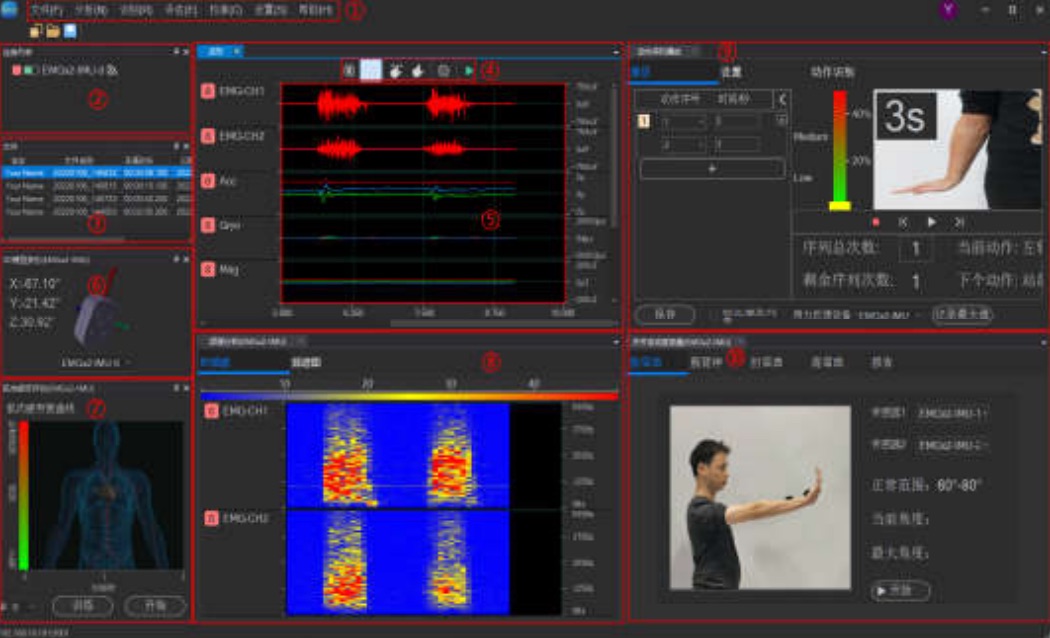
表面肌电采集分析软件
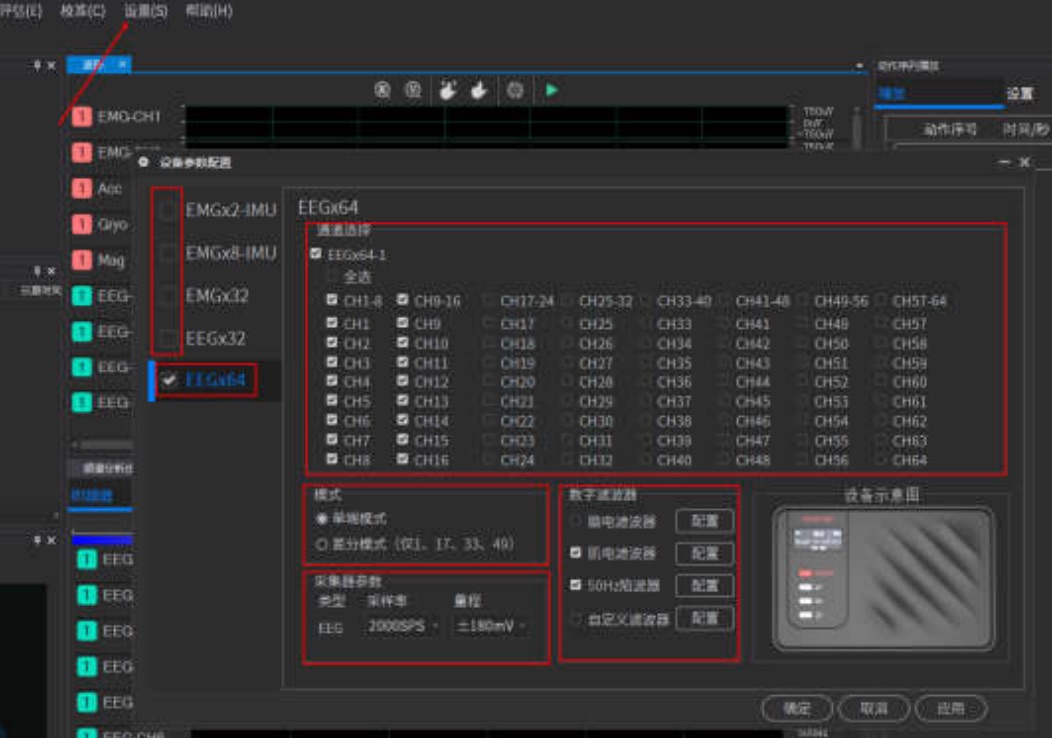
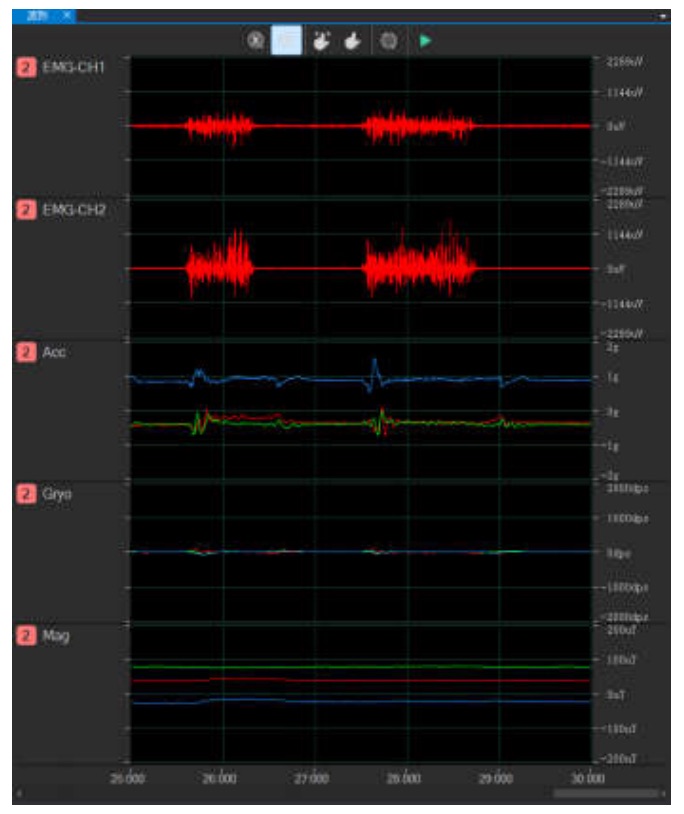
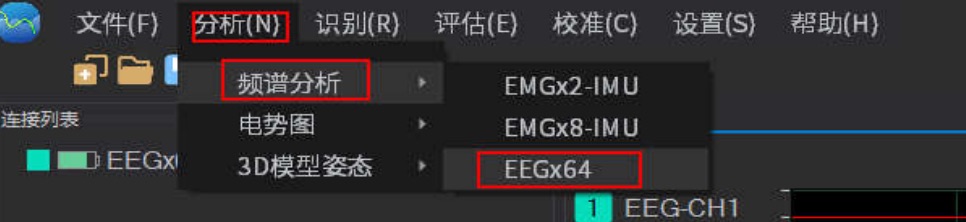
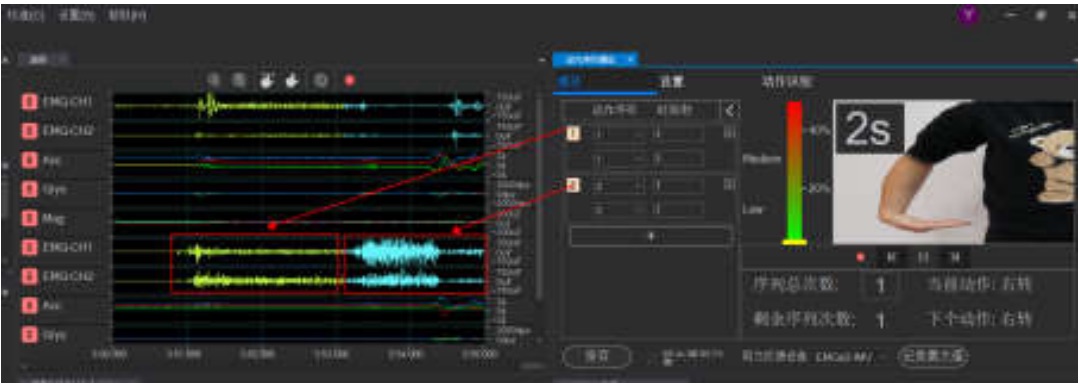
主要优势: 1、多模态数据同步模块,可实现多种信号实时同步传输; 2、可配置设备的采集参数,实现数据同步采集功能,可显示实时波形、实时频谱图、实时电势图和3D模型姿态; 3、自定义动作序列播放功能,并用Mark点标记动作事件信息;
软件操作界面
支持肌电、心电、脑电、惯性信号、血氧、血压的多种信号联合采集,并配置设备采集参数
实时显示设备的连接状态、电量和信号强度
实时显示波形
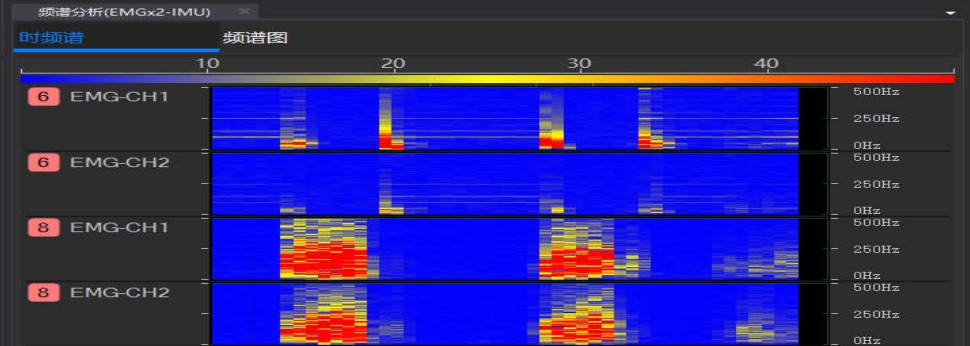
实时频谱图、时域频谱
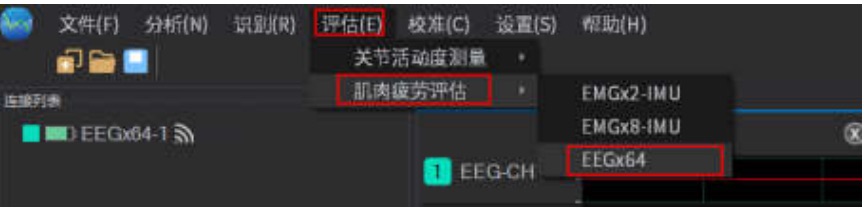
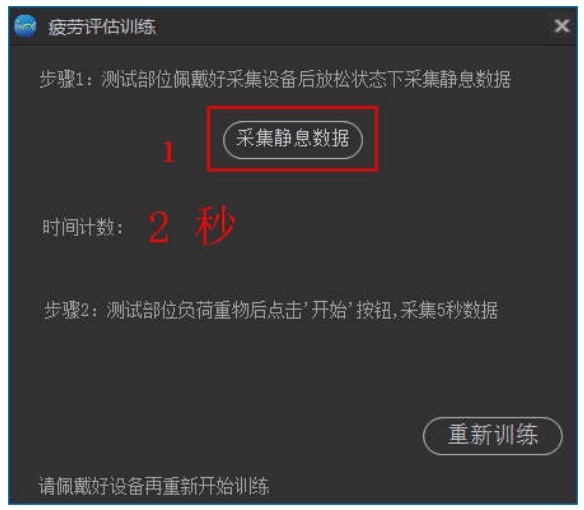
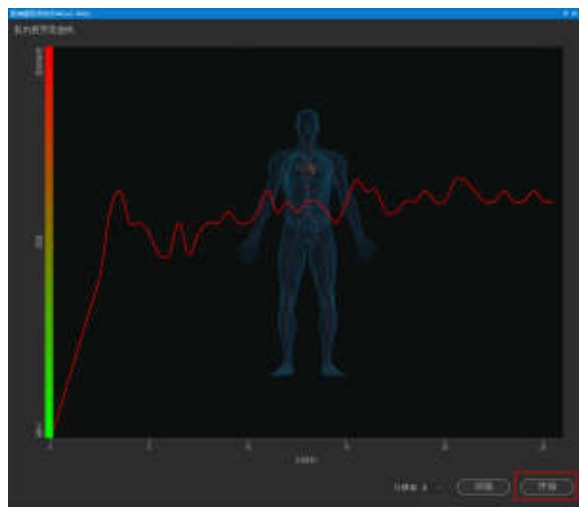
肌肉疲劳分析
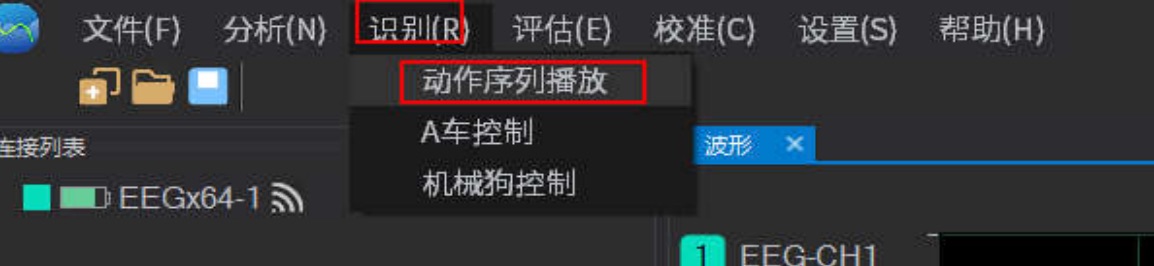
自定义动作序列播放功能,并用Mark点标记动作事件信息,不同动作序列用不同颜色表示
如果您对表面肌电研究感兴趣,请与我们联系!
声明:文章仅用于学术交流,不用于商业行为,若有侵权及疑问,请后台留言,管理员即时删侵!
|


































【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |