| 同步运动:电子凸轮基本概念学习 | 您所在的位置:网站首页 › 齿轮的往复运动是什么现象呢 › 同步运动:电子凸轮基本概念学习 |
同步运动:电子凸轮基本概念学习
|
参考文献 [1]娄宇翔. 基于PLC与伺服系统控制的电子凸轮应用研究[D].大连理工大学,2014. [2]张少林. 基于网络的多轴运动控制技术及电子凸轮实现[D].华中科技大学,2013. 前置知识:机械原理- 机械凸轮设计 1基础 1.1机械凸轮基础机械凸轮(CAM)是一种能够按照动力学特征和运行学特征的要求,具有曲线或着曲面轮廓作为高副元素的构件。 从动件(Driven Link)是机构中除了主动件以外随着主动件运动的其余可动构件。 凸轮曲线(CAM Curve)是凸轮驱动从动件的运动曲线。 两个构件之间接触的点、线、面的组合称为副元素。如果副元素为点或线,则运动副为高副。
凸轮轮廓曲线设计 机械凸轮通常作连续等速转动,也可作往复摆动和移动,从动件根据使用要求设计使它获得一定规律的运动。 简单来讲,机械凸轮通过凸轮的轮廓形状将两轴的运动联系起来,通过设计不同的凸轮轮廓曲线,使两轴具有合适的运动规律。 电子凸轮(ECAM)是利用构造的凸轮曲线来模拟机械凸轮,以达到机械凸轮系统相同的凸轮轴于主轴之间相对运动的软件系统。电子凸轮相当于无数个各种类型的机械凸轮的集合体,只需进行参数配置,即可适用于各种方案,典型的电子凸轮应用有:飞剪、旋切、追剪、飞锯、跟随、同步、追及等。 电子凸轮相比于机械凸轮的优点: 兼容性: 机械凸轮一种结构只能实现一种运动动作,电子凸轮可以通过程序修改运行精度: 电气元件精度远高于机械精度设备结构: 电子凸轮机构上的组成通常仅需一套简单的传送机构安全性能: 伺服系统的制动时间远短于机械动态制动电子凸轮根据动作特点分类: 5. 单向型:一致执行同向运动,如飞剪、旋切、追及等; 6. 双向型:执行的往复运动如追剪、飞锯等; 7. 特殊型:根据自由的曲线进行动作的曲线,如跟随、同步等; 电子凸轮系统由4部分构成:上位机(如PLC)、驱动部分(如伺服电机)、执行部分(如直线滑台)和检测部分(各类传感器)。 电子凸轮的基本运动实现过程:将电子凸轮曲线导入上位机,上位机根据电子凸轮曲线的位置数据对相应的执行部分进行控制,通过外部信号或内部逻辑进行电子凸轮运动的启动和停止。 2相关名词释义定义凸轮为主轴,推杆为从轴,那么凸轮的实质就是从轴对应主轴的一种函数关系。 2.1主轴一般将一个运行周期内,以固定速度进行传动的轴作为主轴,主轴是在凸轮曲线中作为X轴的变量函数。 主轴可以是实际的轴(实轴)。或虚拟的轴(虚轴)。 获取主轴位置的方法 虚轴: 通过软件虚构出的轴,或通过总线通信的方式传递过来的轴代替真实的主轴,其位置可以用软件设置代替。实轴: ●通过实轴的编码器反馈数值获取 ●通过外置的位置检测装置反馈数值获取 2.2从轴从轴是根据凸轮曲线进行运转的,在凸轮曲线中作为Y轴的变量函数,从轴的作用类似机械凸轮机构中的凸轮作用,因此只能是实际的轴,但可以有多个从轴。以电子凸轮为核心的运动控制都是以主轴和一个从轴或者多个从轴为基础的运动系统,即多轴控制系统,其核心部分为智能化的运动控制器和通信总线。 从轴的位置控制一般采用伺服系统实现: ●日系的低成本伺服采用输出脉冲的方式,其可能的缺点为丢脉冲,以及响应的实时性能不足。 ●欧系伺服采用总线通信方式实现,同步能力更为精确。 2.3电子凸轮曲线电子凸轮曲线(Cam)就是主轴和从轴之间的位置关系,是一个二维坐标系。 电子凸轮曲线可分为双向型电子凸轮曲线和单向型电子凸轮曲线。 双向型电子凸轮曲线(闭环曲线):开始位置和最终位置是同一个位置,其电子凸轮曲线和坐标系形成一个封闭的曲线。 单向型电子凸轮曲线(开环曲线):开始位置和最终位置不是同一个位置,无法形成一个封闭的曲线。 电子凸轮曲线有多种描述方式,常采用数据列表的形式,即凸轮表(Cam Table)来替代图形编辑器。 以Codesys的CAM表为例:
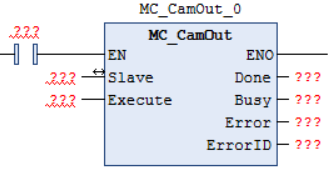
电子离合:用于控制电子凸轮主从轴的啮合与分离,从而实现关闭电子凸轮功能或跳过几个循环周期的效果。 无量纲化(nondimensionalize):指通过一个合适的变量替代,将一个涉及物理量的方程的部分或全部的单位移除,以求简化实验或者计算的目的 凸轮曲线的缩放、偏移:通过调整凸轮曲线来适应一些复杂应用。 3.2 常用功能块仍以CodySys为例,常用的功能块见下,说明摘自汇川技术《中型PLC编程手册(运动控制篇)》。 MC_CamTableSelect该功能块用于关联主轴、从轴、凸轮表三者的关系,并设定凸轮运行的周期、主轴从轴的位置模式(绝对位置或相对位置)等,该指令为管理型指令,即触发该指令,只执行一次之后,相关主从轴就可以按该特性一直运行下去了;若需要更换凸轮表,或改变主从轴,就需要再触发执行该功能块一次。 使凸轮从轴进入与凸轮主轴同步运行状态,根据主轴当前位置、凸轮表的位置关系,控制凸轮从轴调整到对应的目标点。 X = MasterScaling * MasterPosition + MasterOffset Y = SlaveScaling * SlavePosition + SlaveOffset MC_CamOut该功能块用于解除凸轮动作,此时从轴脱离凸轮运行状态,但其运行速度将仍以退出凸轮状态瞬间的速度继续运行,就如机械离合器断开之后,设备从动轮仍会靠惯性继续运转一样。 |



 电子凸轮的两种表达形式:
电子凸轮的两种表达形式: 为了保证设备运行的稳定性,在电子凸轮曲线的设计必须保证位置部分没有中断和跳动,且速度和加速度变化也必须平稳。电子凸轮曲线种类较多,可参考VDI 2143标准。实际应用中多采用五次多项式(5th degree polynomial ),因其可确定路径段起始点和终止点的位置、速度和加速度,且具有较好的平滑过渡性和适中的计算复杂度。
为了保证设备运行的稳定性,在电子凸轮曲线的设计必须保证位置部分没有中断和跳动,且速度和加速度变化也必须平稳。电子凸轮曲线种类较多,可参考VDI 2143标准。实际应用中多采用五次多项式(5th degree polynomial ),因其可确定路径段起始点和终止点的位置、速度和加速度,且具有较好的平滑过渡性和适中的计算复杂度。 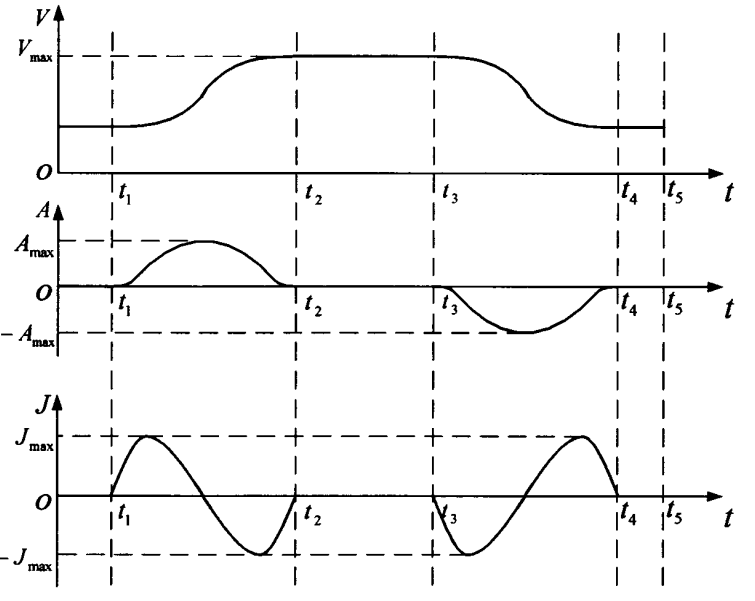 五次多项式运动规律的速度、加速度和加加速度均连续,因而不会产生刚性冲击与柔性冲击,适用于高速、中载运动的场合。
五次多项式运动规律的速度、加速度和加加速度均连续,因而不会产生刚性冲击与柔性冲击,适用于高速、中载运动的场合。 表行可分为关键点行(points)和段行(segments),二者隔一行交替出现,用户可创建前者,而后者由软件自动生成。 在关键点行中,X代表主轴位置(X-position),Y代表从轴位置(Y-position),V代表从轴速度(Velocity),A代表从轴加速度(Acceleration),J代表从轴加加速度(Jerk,不可修改); 在段行中,用户仅可指定段类型为五次多项式(Poly5)或线性(Linear),位置限幅和速度、加速度限幅由软件根据相邻关键点行的参数自动设定。
表行可分为关键点行(points)和段行(segments),二者隔一行交替出现,用户可创建前者,而后者由软件自动生成。 在关键点行中,X代表主轴位置(X-position),Y代表从轴位置(Y-position),V代表从轴速度(Velocity),A代表从轴加速度(Acceleration),J代表从轴加加速度(Jerk,不可修改); 在段行中,用户仅可指定段类型为五次多项式(Poly5)或线性(Linear),位置限幅和速度、加速度限幅由软件根据相邻关键点行的参数自动设定。 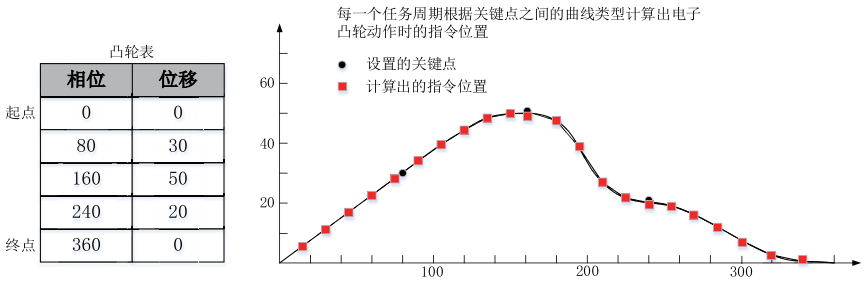



【本文地址】