| 机械臂基础 | 您所在的位置:网站首页 › 绕z轴旋转一周的曲面方程怎么求 › 机械臂基础 |
机械臂基础
|
位姿描述和齐次变换
1 刚体位姿描述
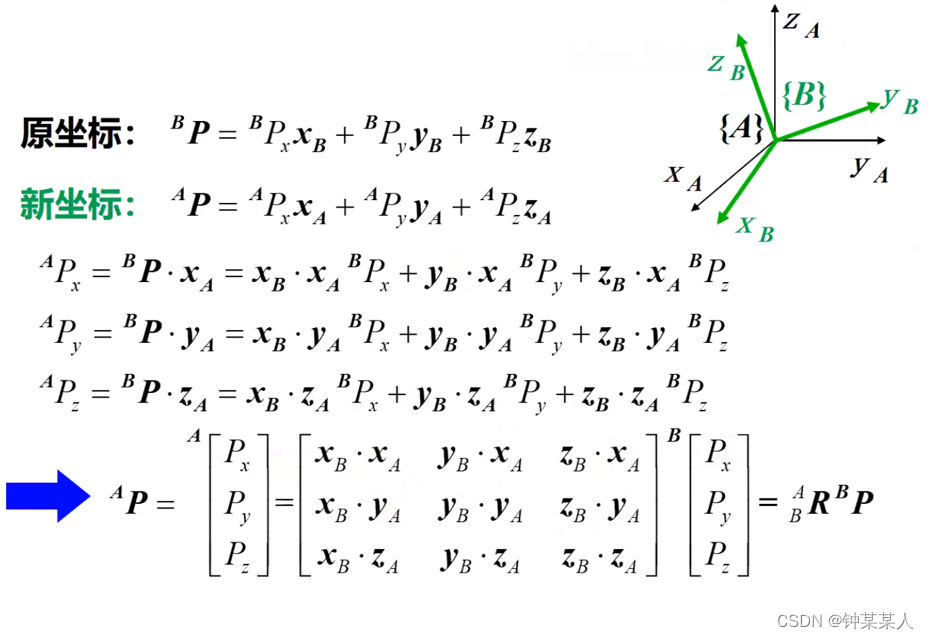
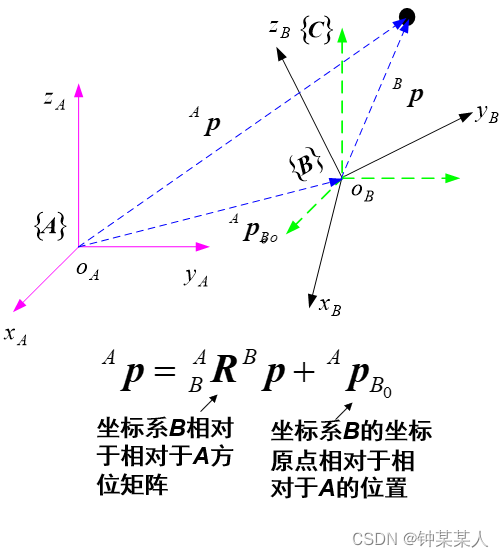
机械臂的各个连杆、操作对象、工具、工件和障碍物均描述为刚体(在运动中和受力作用后,形状和大小不变,而且内部各点的相对位置不变的物体)。 刚体位姿描述:齐次变换(矩阵)、矢量法、四元数 在坐标系{A}中的任意一个点可以表示为列向量(矢量)Ap 将刚体B与坐标系{B}固接,{B}的原点选择刚体质心,相对参考坐标系{4,坐标系{B}的位姿:
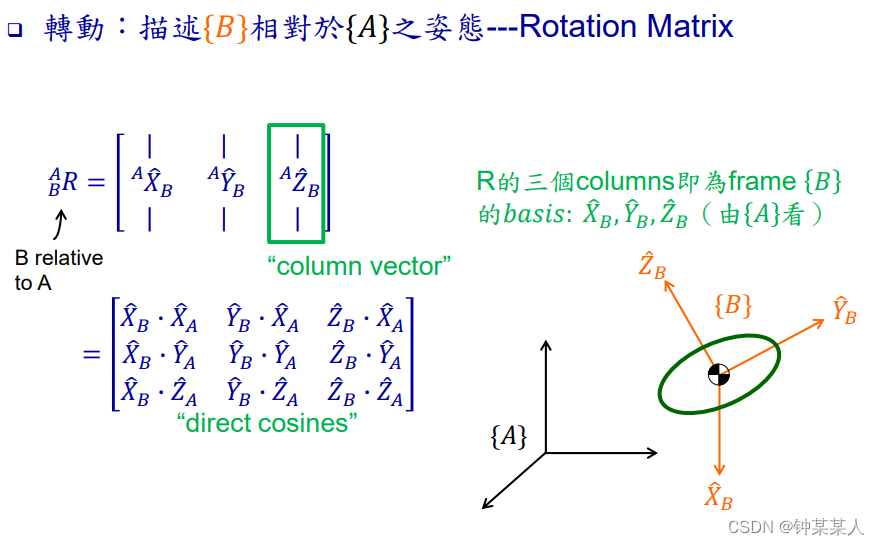
(1)用于描述坐标系{B}相对于{A}的姿态 (2)用于转换向量坐标,矢量在两个坐标系之间的变换 三个旋转矩阵之间的关系:绕那个轴旋转,主对角线上相应位置元素为1,其余为cos,cos转置位置为sin,绕y时左下角为负,绕xz时右上角为负。 {B}绕{A}的x、y、z轴旋转,则旋转矩阵如何计算: 1.2.1.3 旋转群
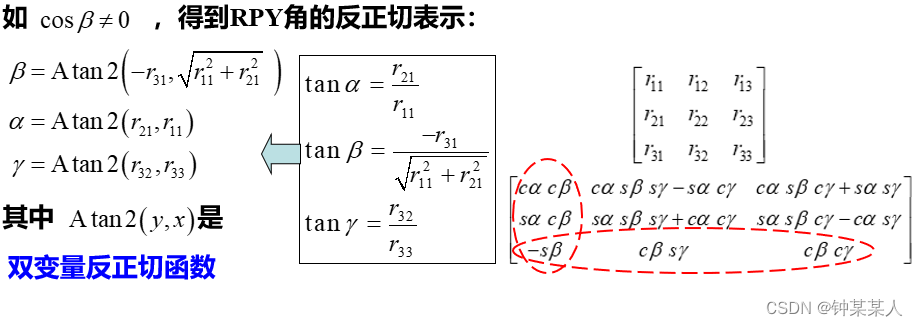
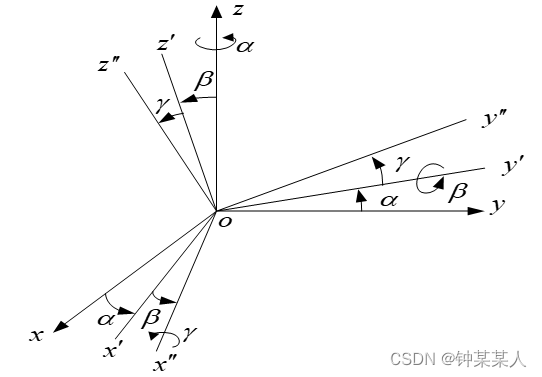
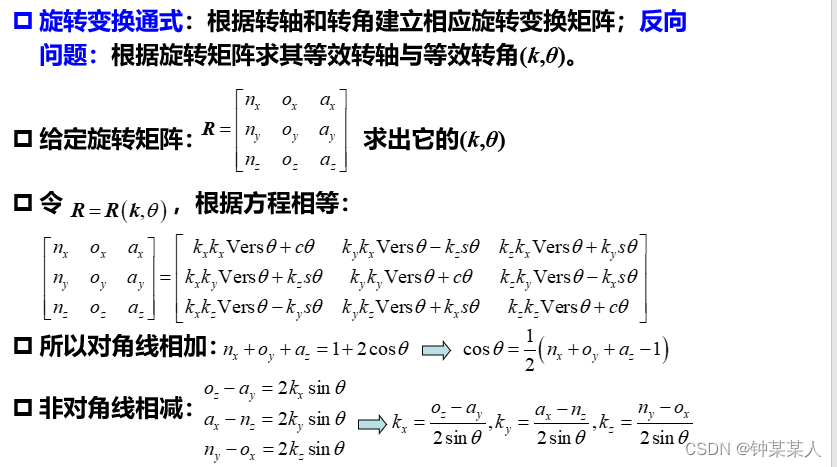
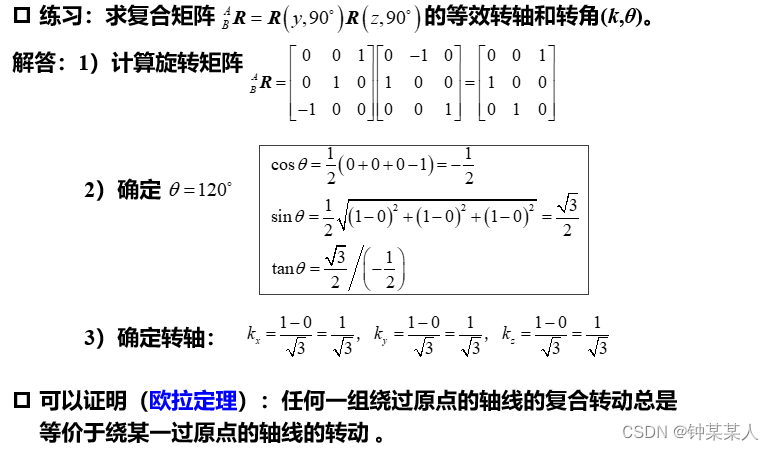
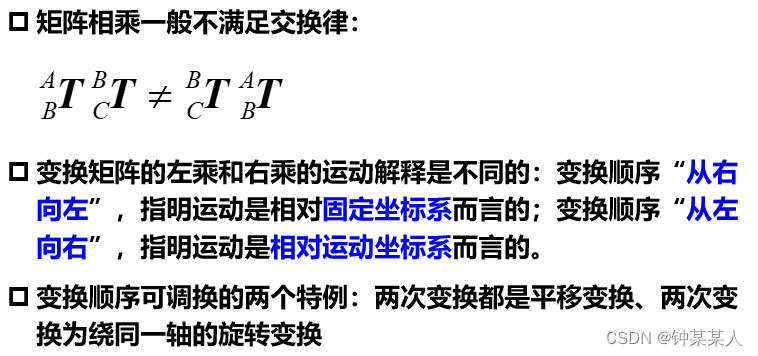
空间中的旋转是3自由度,那么如何把一般的旋转矩阵所表达的姿态,拆解成为3次旋转的角度,以对应到3个自由度? ▣拆解成为3次旋转连乘所需要注意的事项: 旋转不具备互换性,多次旋转的先后顺序需要明确定义 旋转转轴也需要明确定义,究竟是对固定不动]的转轴旋转?还是对转动的坐标系当下所在引的转轴旋转? 变换矩阵的左乘和右乘的运动解释是不同的:变换顺序“从右向左”,指明运动是相对固定坐标系而言的;变换顺序“从左 向右”,指明运动是相对运动坐标系而言的。 ▣两种拆解方式: 对方向[固定不动]的转轴旋转:RPY固定轴 对[转动的坐标系当下所在]的转轴旋转:欧拉角 1.2.2 欧拉角与RPY角引入其它参数法表示的必要性: (1)旋转矩阵R用9个元素表示3个独立变量(不方便); (2)R作为变换或者算子使用比较方便,作为方位描述并不方便(很冗余),需要输入较多信息。如:机器人手爪方位的描述 需输入[n o a]; (3)欧拉角与RPY角广泛应用于航海、航天、天文学。 船行驶方向为z轴,绕z轴旋转α角,滚动(Roll); 绕y轴旋转β角,俯仰(Pitch);铅直方向为x轴,绕x轴旋转γ角偏转(Yaw)。 RPY描述坐标系{B}的方法如下:{B}的初始方位与参考系{A}重合。首先将{B}绕zB转α角,再绕yB转β角,最后绕xB转γ角。
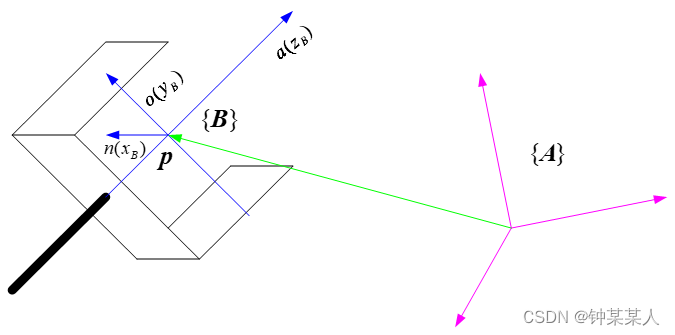
机器人手爪位姿描述与坐标系相同: ◆手爪坐标系——与手爪固接一起的坐标系 z轴——手指接近物体的方向,接近矢量a(approach) y轴——两手指的连线方向,方位矢量o(orientation) x轴——右手法则规定,法向矢量n=o×a(normal) ◆手爪的方位—旋转矩阵R,描述手爪的姿态: R=[n o a] ◆手爪位姿的描述 :{T} = {n o a p}
一般变换方程——{A,B}原点和位置均不相同
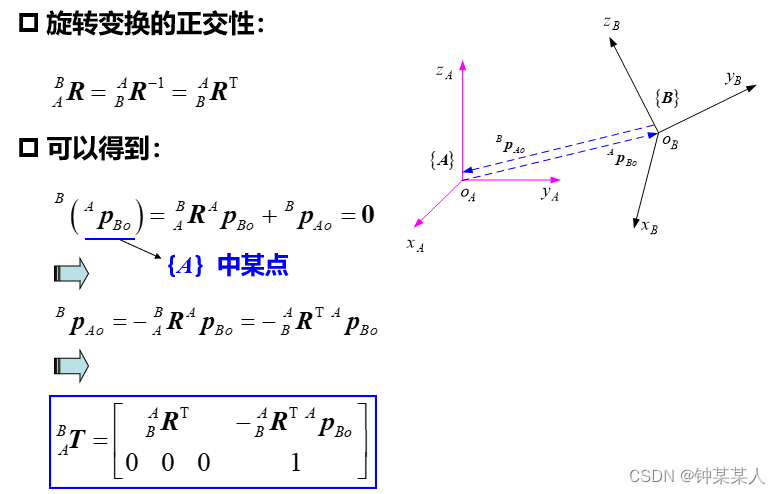
齐次变换矩阵:代表坐标平移与旋转复合,可分解为: 平移算子:右上角的3*1的单位矩阵 相乘 求逆
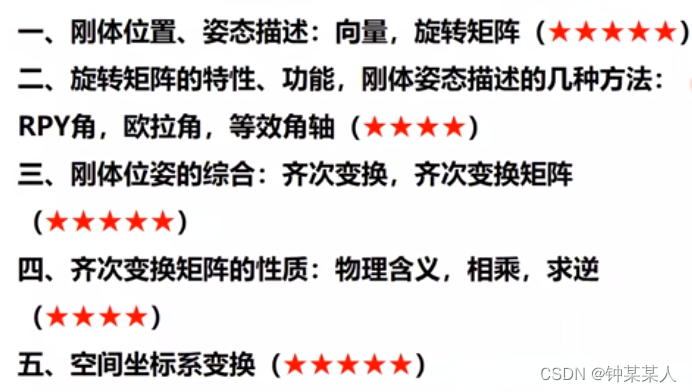
思考与梳理: 向量可以表示的空间关系:位置、(方向)方位 旋转矩阵的特性:9个元素、6个隐含的条件(每两个列向量垂直)、3个独立变量,A到B的旋转矩阵为B到A旋转矩阵的转置,正交矩阵 旋转矩阵的功能:描述两个坐标系之间的姿态,转换两个坐标系内的向量坐标,描述刚体转动的状态 为什么要引入RPY角和欧拉角旋转:旋转矩阵9个矩阵表示三个变量不方便;任意姿态可能绕3个轴旋转,旋转矩阵变量多达27个; RPY角和欧拉角旋转的本质区别:RPY角旋转针对固定轴;欧拉角旋转针对运动轴
|
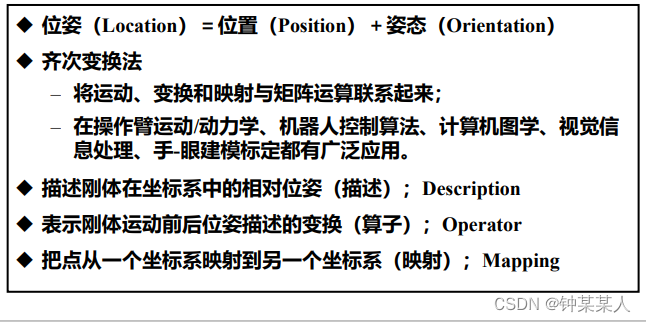 变换矩阵的三个功能:描述、算子、映射
变换矩阵的三个功能:描述、算子、映射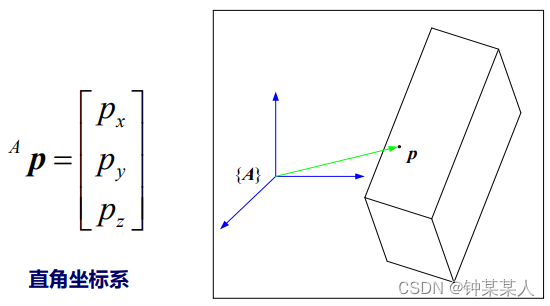 符号表示: 小写粗体:矢量/向量;大写粗体:矩阵/坐标系/刚体群;小写非斜体:变量/角度
符号表示: 小写粗体:矢量/向量;大写粗体:矩阵/坐标系/刚体群;小写非斜体:变量/角度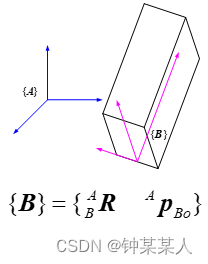
 旋转矩阵的三个特征:1、九个元素只有三个独立变量;2、行列式为1;3、旋转矩阵是正交矩阵
旋转矩阵的三个特征:1、九个元素只有三个独立变量;2、行列式为1;3、旋转矩阵是正交矩阵 
 (3)用于描述物体转动状态 下图所示旋转矩阵,由上图公式计算所得,如绕x轴旋转,因为x轴重合,所以xB与xA的点积为1,zB与yA夹角为90+θ,所以cos(90+θ)=-sinθ;yB与zA夹角90-θ,所以cos(90-θ)=sinθ。
(3)用于描述物体转动状态 下图所示旋转矩阵,由上图公式计算所得,如绕x轴旋转,因为x轴重合,所以xB与xA的点积为1,zB与yA夹角为90+θ,所以cos(90+θ)=-sinθ;yB与zA夹角90-θ,所以cos(90-θ)=sinθ。 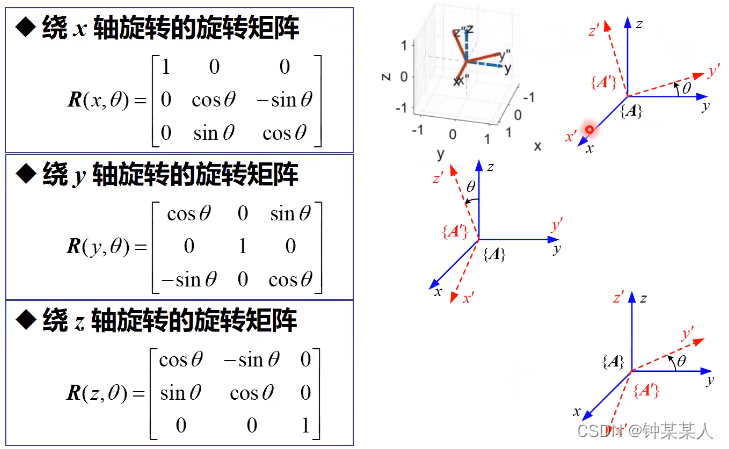 附:三角函数公式表
附:三角函数公式表 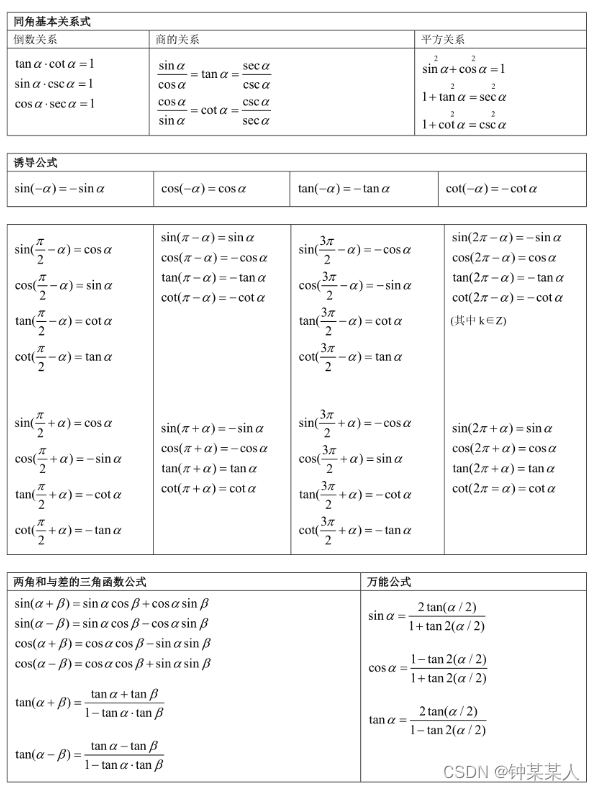
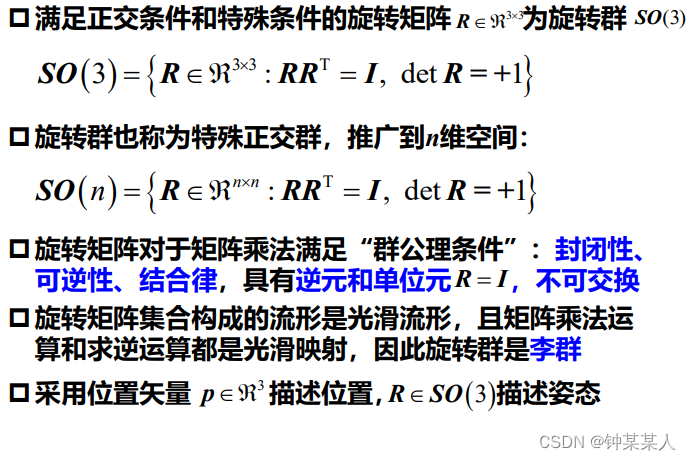 为了解决机器人中的估计问题,对状态和估计的建模包括方程和不确定性,研究者们设计了流形(manifold),即为李群的光滑平面。在李概念(Lie theory,LT)基础上可以构建微积分方程,主要应用于旋转 SO(3) 和平移 SE(3)。
为了解决机器人中的估计问题,对状态和估计的建模包括方程和不确定性,研究者们设计了流形(manifold),即为李群的光滑平面。在李概念(Lie theory,LT)基础上可以构建微积分方程,主要应用于旋转 SO(3) 和平移 SE(3)。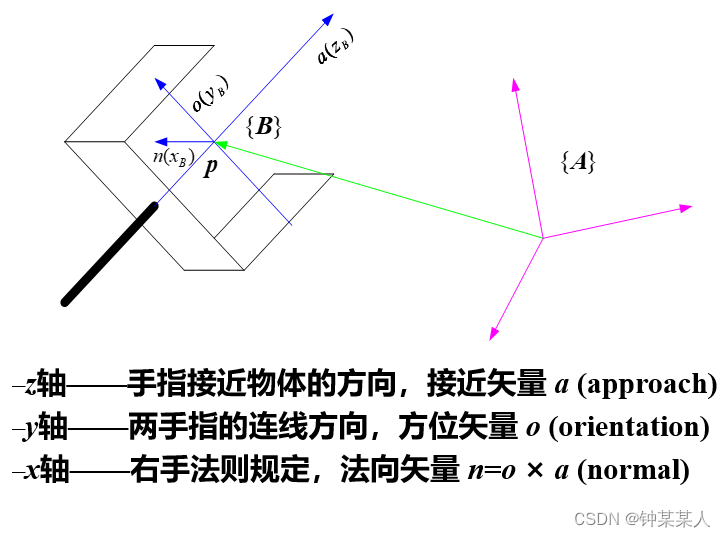 RPY角旋转针对固定轴;欧拉角旋转针对运动轴
RPY角旋转针对固定轴;欧拉角旋转针对运动轴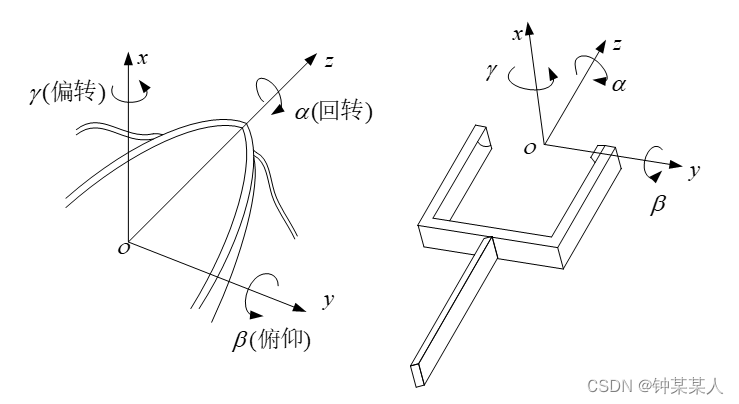 RPY描述坐标系{B}的方法如下:{B}的初始方位与参考系{A}重合。首先将{B}绕xA转γ角,再绕yA转β角,最后绕zA转α角。
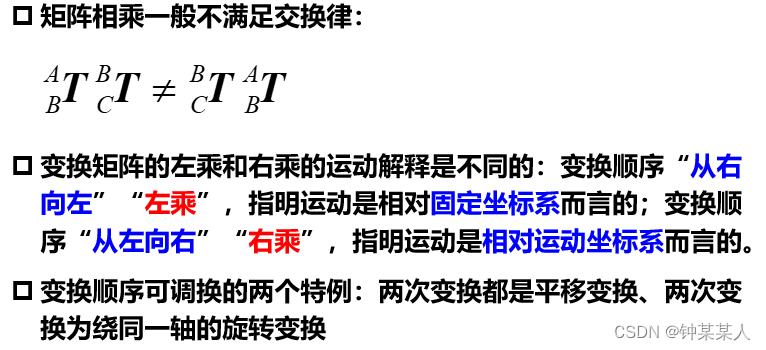
RPY描述坐标系{B}的方法如下:{B}的初始方位与参考系{A}重合。首先将{B}绕xA转γ角,再绕yA转β角,最后绕zA转α角。 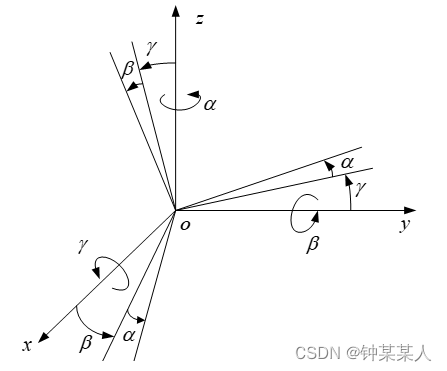 绕固定轴x-y-z旋转”的RPY角法。按照**“从右向左”“左乘”**的原则:
绕固定轴x-y-z旋转”的RPY角法。按照**“从右向左”“左乘”**的原则: 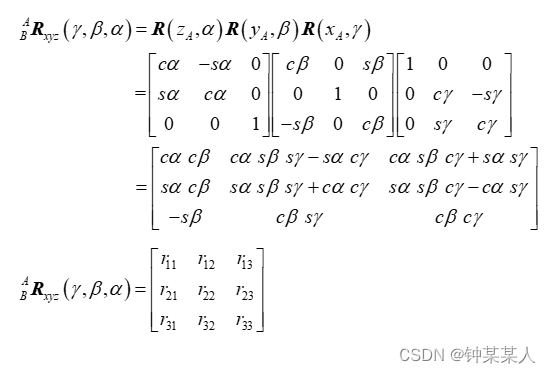 超越方程:3个独立变量、9个约束方程(6个不独立)
超越方程:3个独立变量、9个约束方程(6个不独立) 
 各次转动相对运动坐标系的某轴进行的,转动顺序是绕z轴,y轴和x轴,故称为z-y-x(欧拉角)。按照**“从左向右”“右乘”原则
各次转动相对运动坐标系的某轴进行的,转动顺序是绕z轴,y轴和x轴,故称为z-y-x(欧拉角)。按照**“从左向右”“右乘”原则  可以看出,与绕固定轴x-y-z的旋转结果完全相同。这是因为绕固定轴旋转的顺序若与绕运动旋转的顺序相反,且旋转的角度也对应相等,所得到变换矩阵是相同的**。
可以看出,与绕固定轴x-y-z的旋转结果完全相同。这是因为绕固定轴旋转的顺序若与绕运动旋转的顺序相反,且旋转的角度也对应相等,所得到变换矩阵是相同的**。
 上述手爪位姿的描述仍然没有解决{T} 矩阵元素 n、o、a、p均为31列向量组成整体34矩阵的问题,由此引入齐次坐标变换
上述手爪位姿的描述仍然没有解决{T} 矩阵元素 n、o、a、p均为31列向量组成整体34矩阵的问题,由此引入齐次坐标变换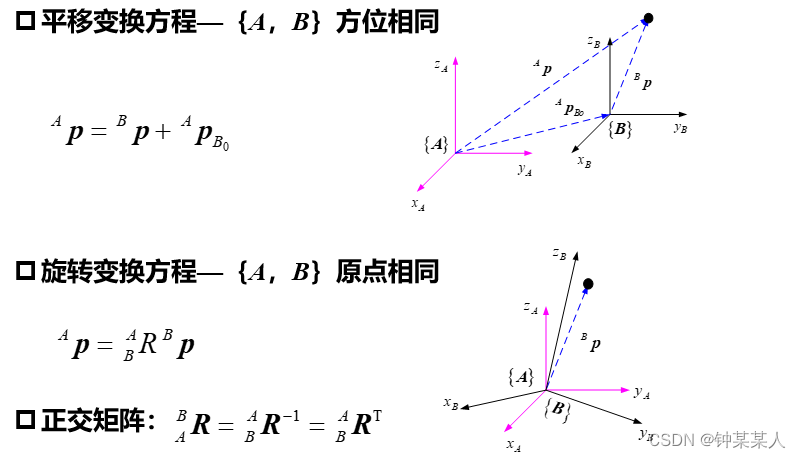
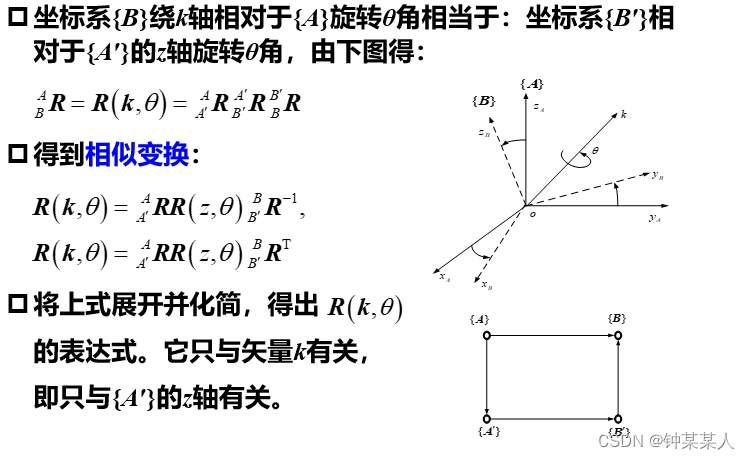
 过渡矩阵——坐标系**{C}与{A}姿态相同,Cp为{B}坐标系内点在{C}**中的位置描述。
过渡矩阵——坐标系**{C}与{A}姿态相同,Cp为{B}坐标系内点在{C}**中的位置描述。 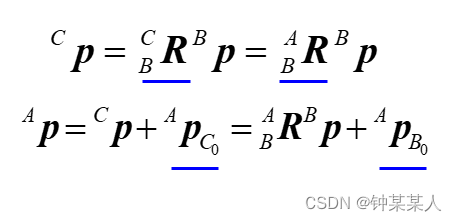 计算案例:
计算案例: 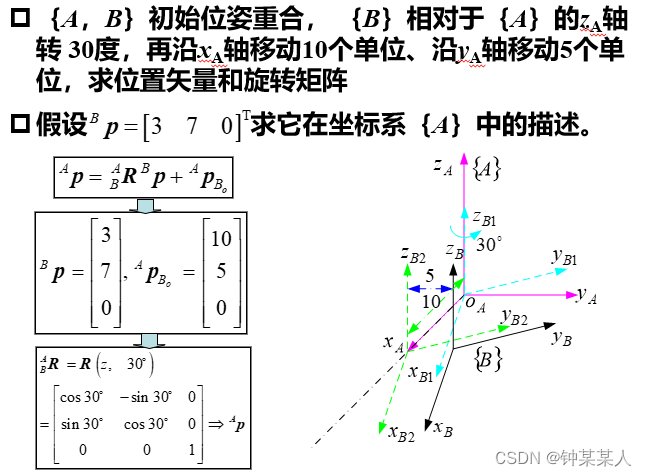
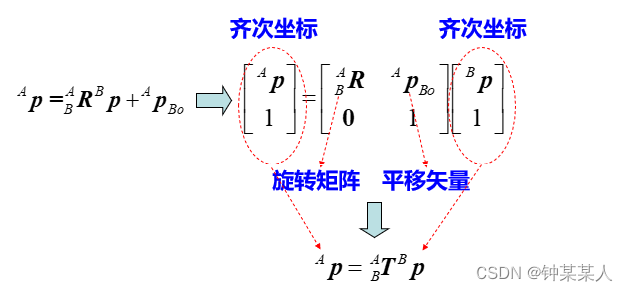 齐次坐标变换矩阵是4X4的方阵,其形式如下:
齐次坐标变换矩阵是4X4的方阵,其形式如下: 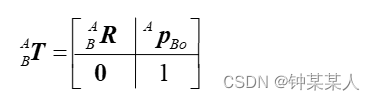 齐次变换:是为了确定机械臂的位置和姿态。利用齐次变换坐标来表示了三维坐标系内某一点的坐标。
齐次变换:是为了确定机械臂的位置和姿态。利用齐次变换坐标来表示了三维坐标系内某一点的坐标。 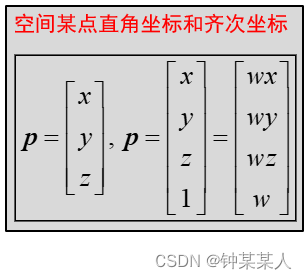 规定:如下列向量(齐次坐标)表示空间的无穷点远
规定:如下列向量(齐次坐标)表示空间的无穷点远  [1000]T——x轴 [0100]T——y轴无穷远点 [0010]T——z轴无穷远点 [0000]T——无意义 [0001]T——代表0点(坐标原点) 利用齐次坐标不仅可以规定点的位置,还可用来规定矢量的方向:当第4个元素非零时,代表点的位置;第4个元素为零时,代表方向。
[1000]T——x轴 [0100]T——y轴无穷远点 [0010]T——z轴无穷远点 [0000]T——无意义 [0001]T——代表0点(坐标原点) 利用齐次坐标不仅可以规定点的位置,还可用来规定矢量的方向:当第4个元素非零时,代表点的位置;第4个元素为零时,代表方向。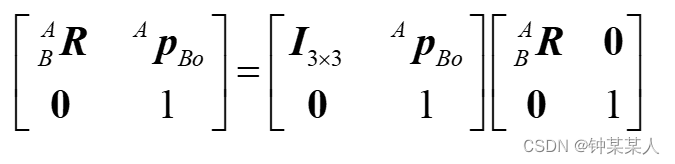
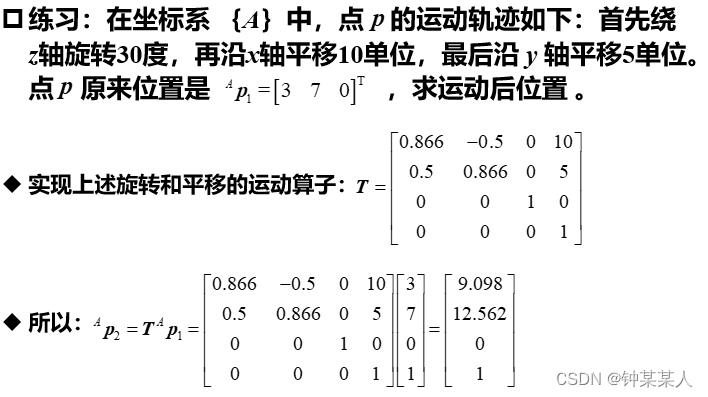
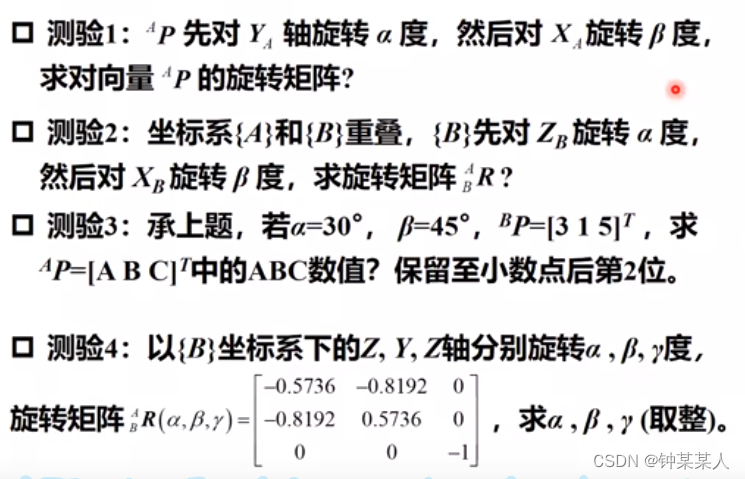
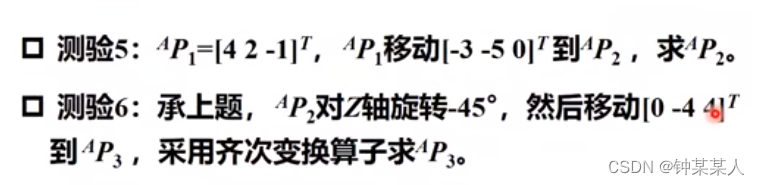
 案例:
案例: 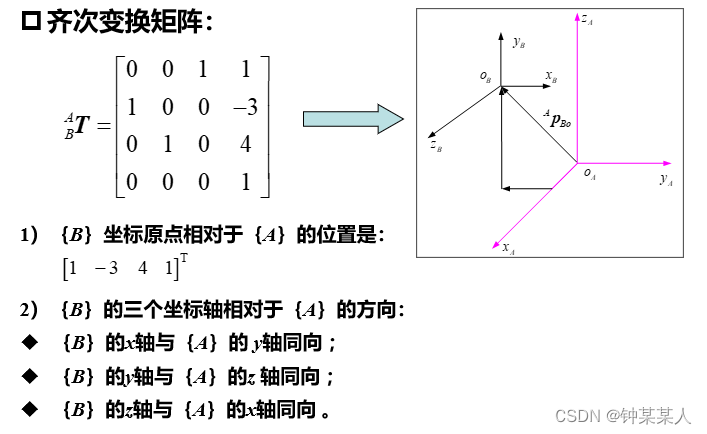
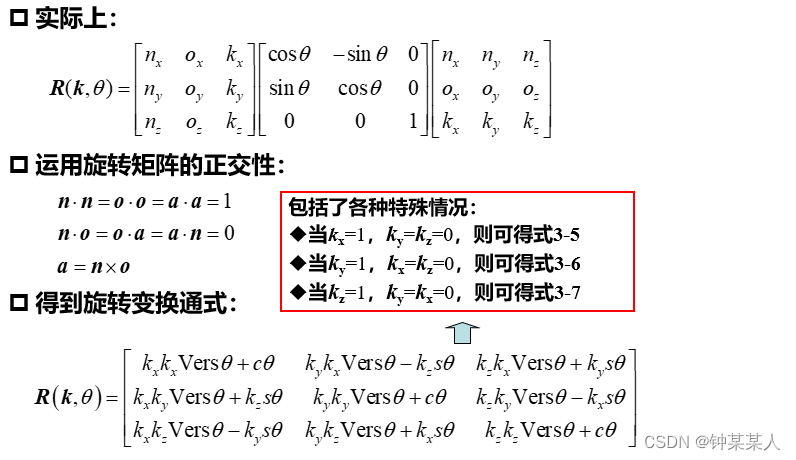
 旋转算子:
旋转算子:  运动算子的一般形式:
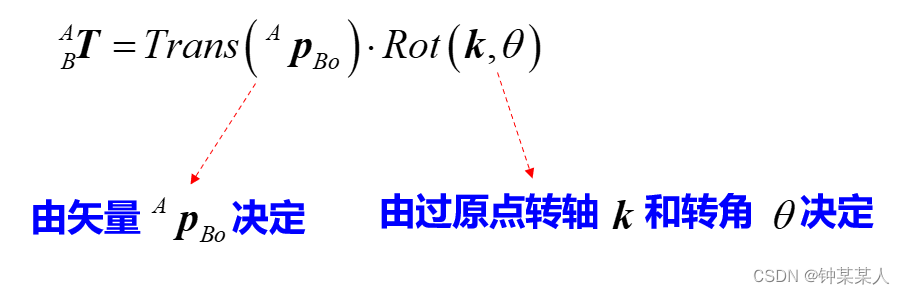
运动算子的一般形式:
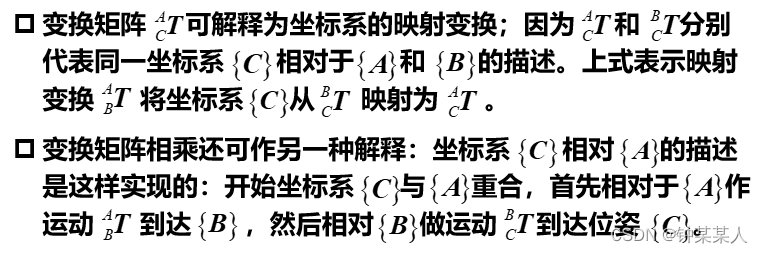
 齐次变换矩阵的物理含义:
齐次变换矩阵的物理含义: 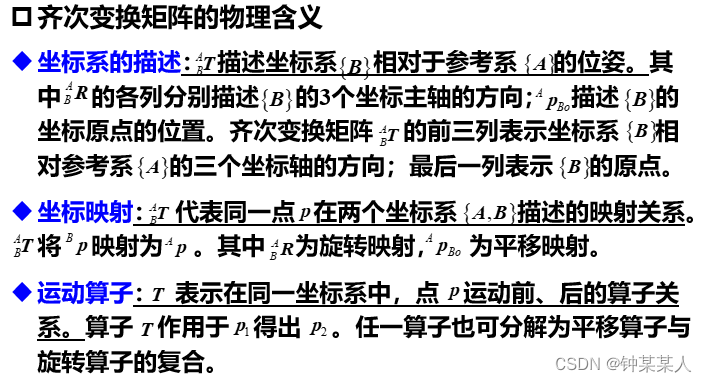
 次序可调,两次变换都是平移或者绕同一轴旋转
次序可调,两次变换都是平移或者绕同一轴旋转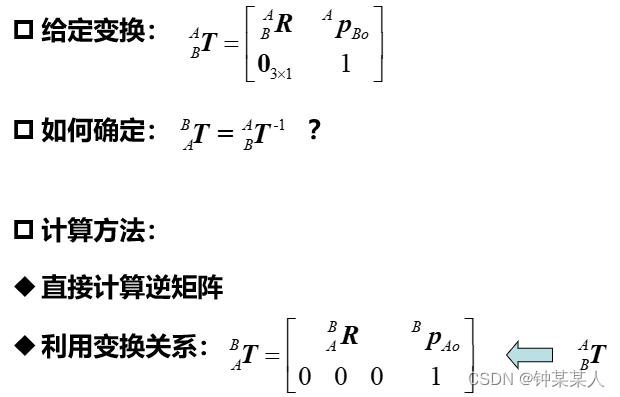
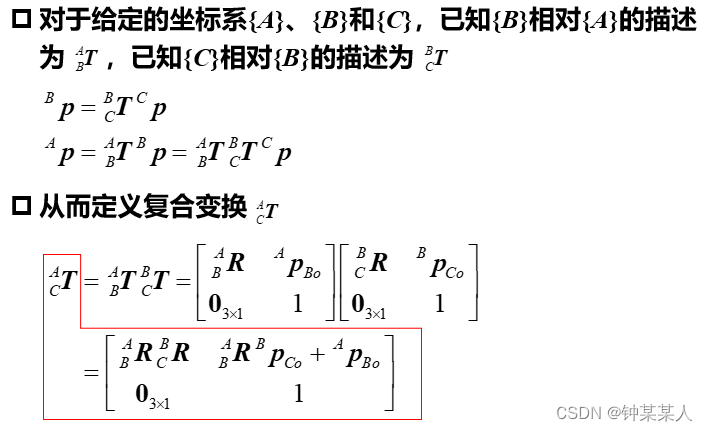
 变换方程:
变换方程: 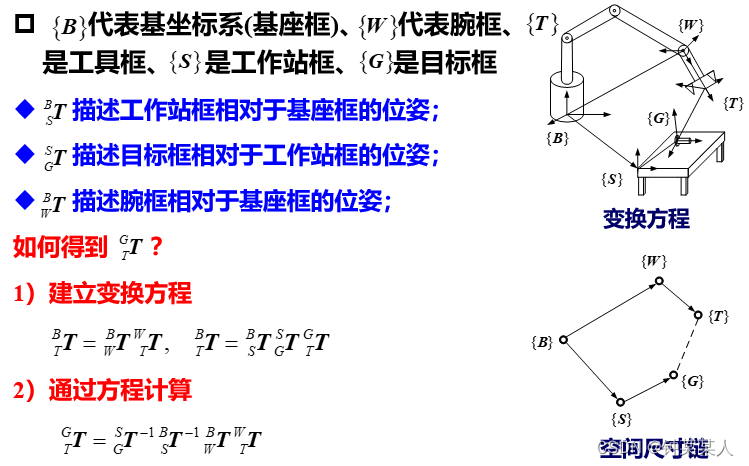 刚体变换群:(自学)
刚体变换群:(自学) 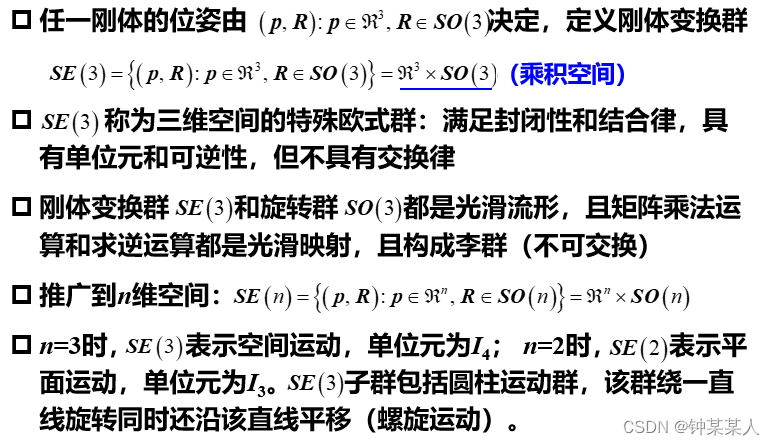
【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |