| LAS数据结构介绍 | 您所在的位置:网站首页 › 激光雷达点云数据格式是什么 › LAS数据结构介绍 |
LAS数据结构介绍
|
内容摘要:机载雷达技术作为一种高精度的三维地物探测手段,其相应的数据格式也在不断发展。美国摄影测量与遥感协会下的LIDAR委员会与2003年发布了标准LIDAR数据格式LAS,本文旨在解析及科普LAS数据格式的内部存储方式。 01前言 机载激光扫描(LIDAR: Light Detection andRanging)技术兴起于上世纪90年代后期,它利用激光测距与GPS定位原理,可以快速获取地物上高精度的三维坐标点。因其比传统的摄影测量技术精度高且测绘范围广,所以近几年来,利用LIDAR技术进行地形,地表测绘已经成为一种趋势。目前的LIDAR点云格式通常是由采集和处理LIDAR数据的硬(软)件商提供,常见的如:Leica公司的仪器采集的LIDAR数据采用ASCII形式的Pts,Ptx格式存储,由TerraScan软件处理后的LIDAR数据常采用二进制的Bin,Ts格式存储。因为不同系统自定义的点云格式难以实现数据间共享,而且大量的点云数据对空间的占用也很巨大。为便于LIDAR数据在不同硬、软件之间的交换和存储,美国摄影测量与遥感(ASPRS)协会下的LIDAR委员会于2003年发布了主要面向机载LIDAR数据的标准格式LAS。
LAS1.0版标准格式是由美国摄影测量与遥感协会(ASPRS)在2003年发布的,经过改进目前已有1.0、1.1、1.2、1.3、1.4,5种版本。2003年制定的1.0版本定义了LAS格式的基本框架,即公共文件头区,变长记录区和点集记录三部分。ASPRS在2005年发布了LAS1.1格式,随后在2008年发布了的LAS1.2格式延续了LAS1.0的原有框架,并对一些字段的解释和组合进行了一些调整。 2.为便于点的识别和使用,LAS1.1规定点集记录中的分类为必选字段,并定义了一套点分类标准,该字段前0到4位用来存储包括未分类点,地面点,低矮植被到建筑物等32种分类。 3.考虑到彩色化LIDAR点的需要,LAS 1.2定义了“3号格式”和“4号格式”点记录,它们增加了红,绿,蓝字段,用来识别在彩色化LIDAR点时要采用的颜色通道。 4.LAS1.3新增了波格式信息,1.4新增了VLR格式信息。 03LAS数据格式详解 LAS 数据的结构,它包括三部分,依次是公共文件头区,变长记录区和点集记录区。首先,公共文件头区记录LAS文件的普通信息,如文件采集日期,生成软件和点记录的个数等。接下来的变长记录区包含一些元数据,如坐标系信息。最后是LAS文件的核心,记录点的X,Y,Z和点属性的点集记录区。这三个模块是紧密相连且互相联系的。 各个数据类型所占内存: Char(1字节) Unsigned char (1字节) Short (2字节) Unsigned short (2字节) Long (4字节) Unsigned long (4字节) Double(8字节) 公共头文件区 公共文件头区中定义了指向点集记录起始位置的指针和点记录的个数,以及点记录格式和长度。通过公共文件头区还可以识别变长记录的个数,同时,一些变长记录也定义了点集记录采用的坐标系等辅助信息。 公共区域结构如表所示: 变长记录由变长记录头和扩展域组成。用户可以通过向ASPRS注册独立的用户ID来定义自己的变长记录,并向其添加自定义信息。每个用户ID下面可以定义65536个记录ID。LAS 1.0格式初始化了两个用户ID,分别是描述坐标系的LASF_Projection和辅助说明点记录中一些字段的LASF_Spec。
LAS格式中有不同的点集记录格式,0号格式的点集记录依次存储了点的坐标(X、Y、Z),激光返回强度。因为激光的穿透性,一束脉冲打到地物上会有多重返回,返回点序号记录了1至5次多重返回中每个点的序号。返回点个数记录了一束激光的所有返回点个数。1号格式点集记录在0号点集记录后增加了获取该点时的GPS时字段。为节省空间,点的实际坐标会以长整型(X、Y、Z)存储,其去除的小数位存储在公共文件头区的比例因子字段。 Xcoordinate = (Xrecord * Xscale) + Xoffset Ycoordinate = (Yrecord * Yscale) + Yoffset Zcoordinate = (Zrecord * Zscale) + Zoffset
|
 02LAS格式的发展
02LAS格式的发展 1.定义了一种新的追踪点的方法,LAS1.1公共文件头区新增了文件源ID字段。同时,原GUID字段改为工程ID,工程ID联合文件源ID保证同一个工程下的每一个文件以及同一个文件中的每一点都可以被唯一识别。
1.定义了一种新的追踪点的方法,LAS1.1公共文件头区新增了文件源ID字段。同时,原GUID字段改为工程ID,工程ID联合文件源ID保证同一个工程下的每一个文件以及同一个文件中的每一点都可以被唯一识别。
 可变记录头
可变记录头 点集记录
点集记录 点存储示意:
点存储示意: 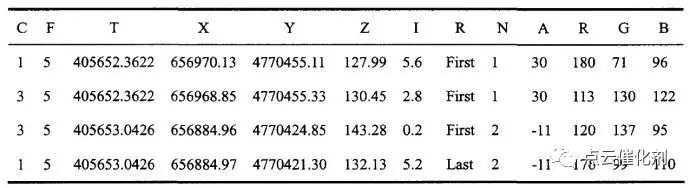 C–class(所属类) F一flight(航线号) T一time(GPS时间) I一intensity(回波强度) R一return(第几次回波) N一number of return(回波次数) A一scan angle(扫描角) RGB一red green blue(RGB颜色值)
C–class(所属类) F一flight(航线号) T一time(GPS时间) I一intensity(回波强度) R一return(第几次回波) N一number of return(回波次数) A一scan angle(扫描角) RGB一red green blue(RGB颜色值)【本文地址】