| ROS与激光雷达入门教程 | 您所在的位置:网站首页 › 激光雷达使用教程图解视频 › ROS与激光雷达入门教程 |
ROS与激光雷达入门教程
|
说明 介绍激光雷达思岚 RPLIDAR S1 介绍在ROS中安装和测试产品介绍
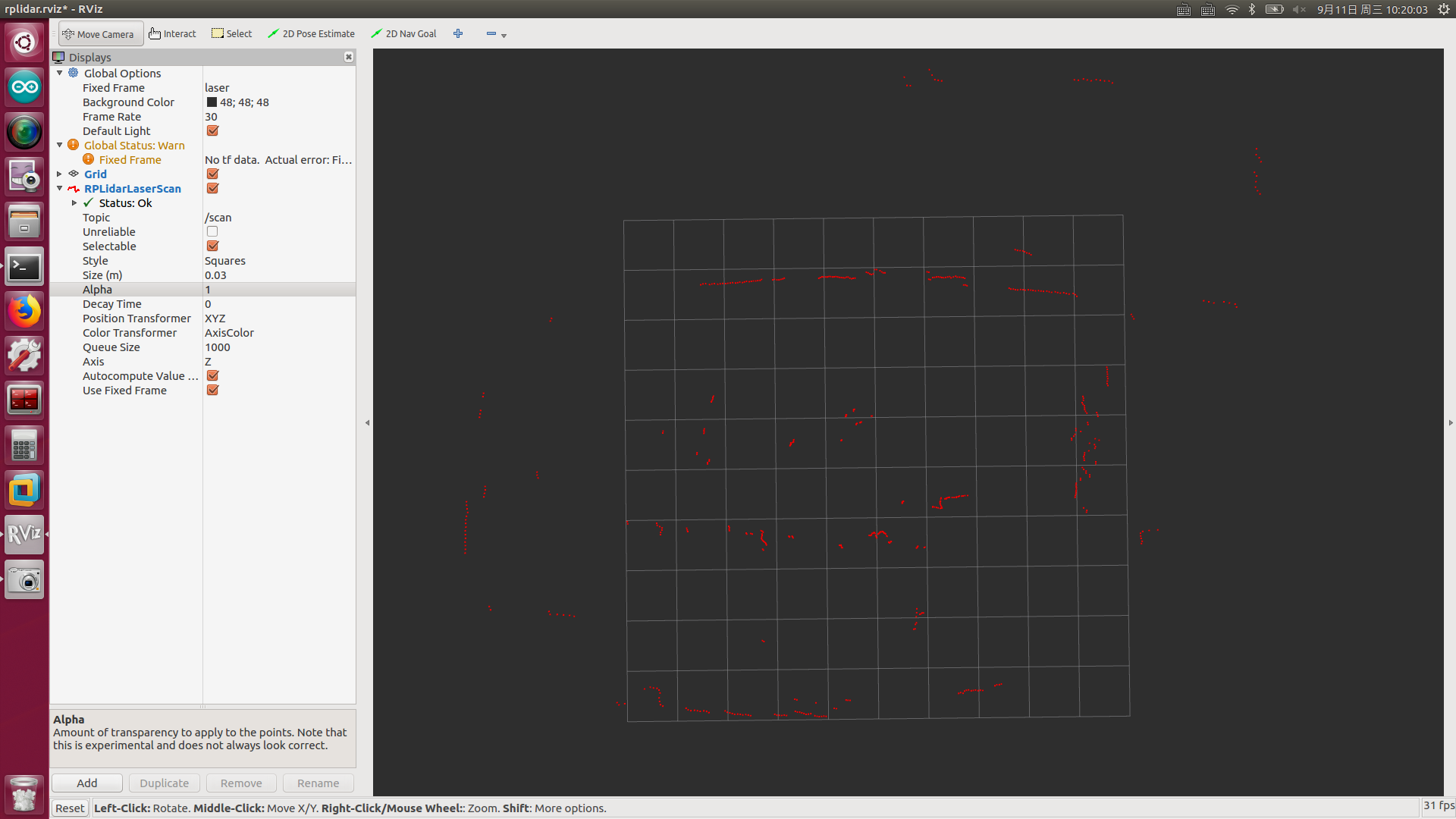
RPLIDAR S1采用TOF测距原理,测量精度高且稳定 RPLIDAR S1测距半径高达40m,可以在广阔的空间进行建图 RPLIDAR S1具备可靠的抗日光干扰能力,无论是在室内或者室外,都可达到同样的建图及测距效果 更多相关资料请查阅官方文档 在ROS中使用RPLIDAR S1 建立工作空间(也可以利用现有的),下载安装编译驱动包 $ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src $ git clone https://github.com/Slamtec/rplidar_ros $ cd ~/catkin_ws && catkin_make $ rospack profile 将雷达连接上电脑,执行测试 $ roslaunch rplidar_ros view_rplidar_s1.launch
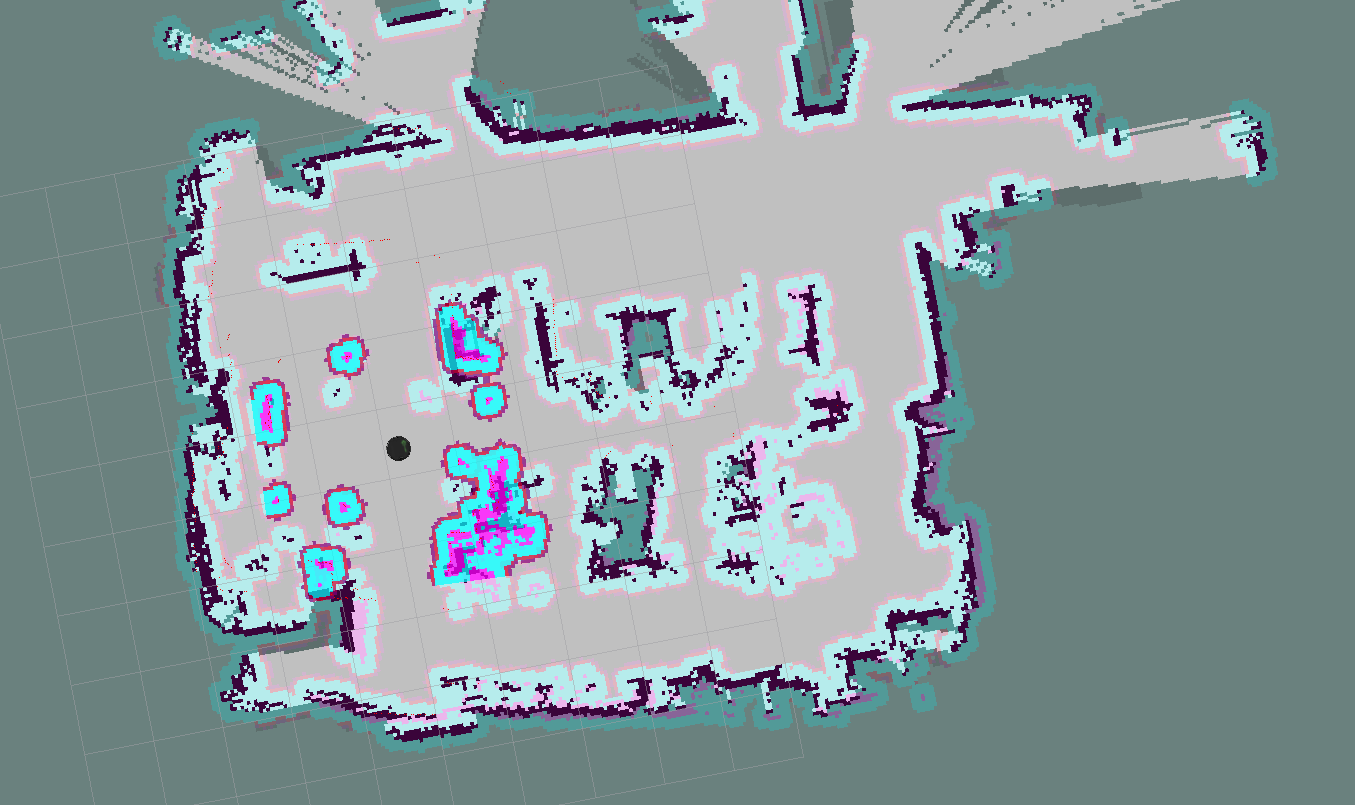
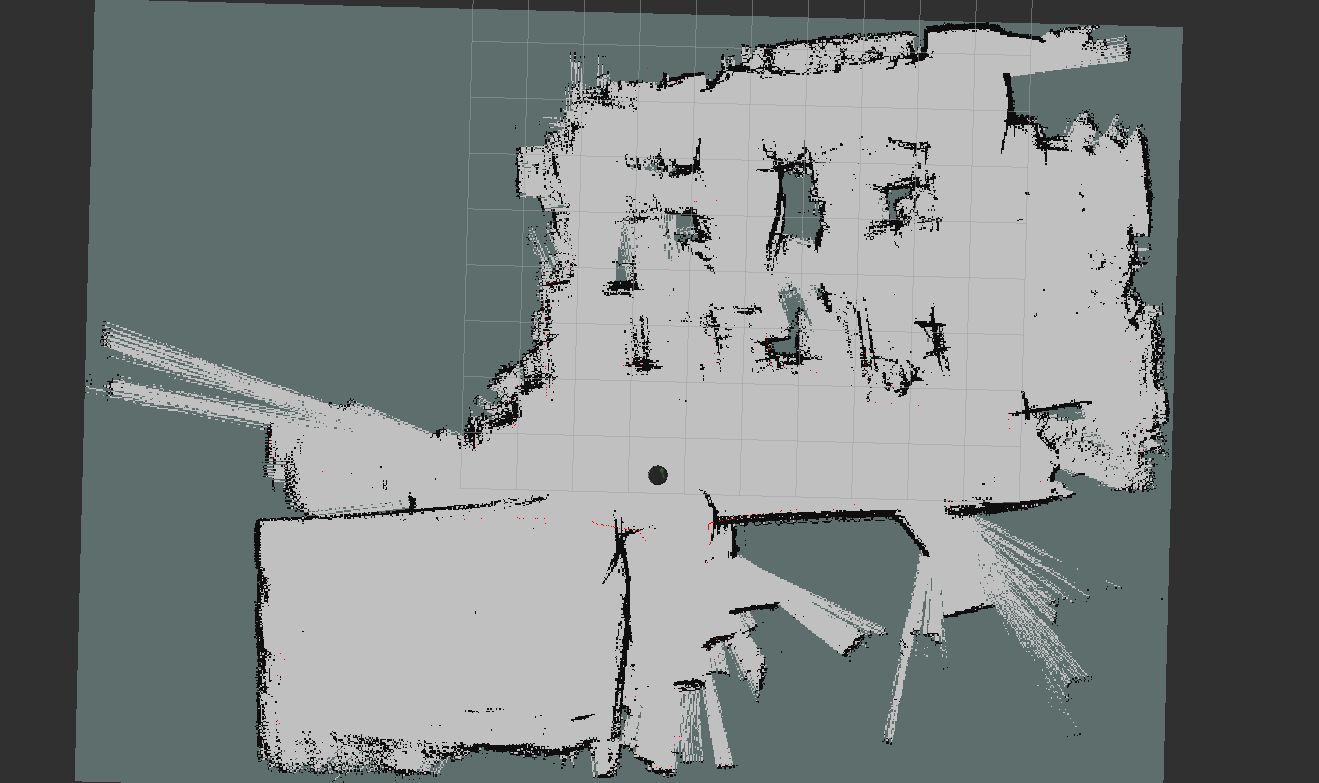
Turbot + RPLIDAR S1 建图测试 Gmapping算法建图效果
|



【本文地址】
公司简介
联系我们