| 模块化空间折展机构研究现状与展望 | 您所在的位置:网站首页 › 平面展开机构 › 模块化空间折展机构研究现状与展望 |
模块化空间折展机构研究现状与展望
|
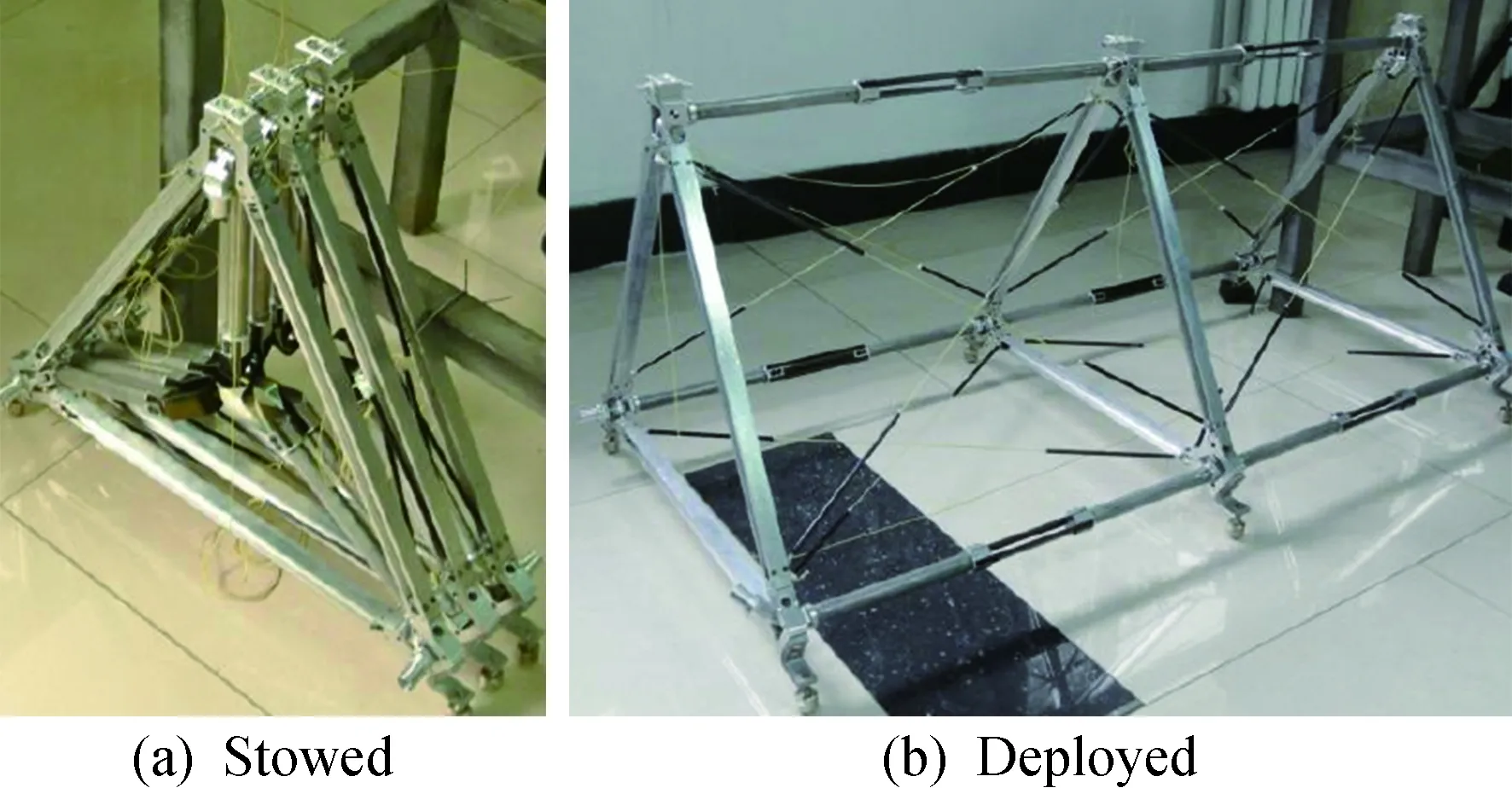
田大可,高海明,金路,刘荣强,马小鸥,范小东,郭振伟 1. 沈阳建筑大学 机械工程学院,沈阳 110168 2. 沈阳建筑大学 土木工程学院,沈阳 110168 3. 哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001 4. 辽宁省科学技术馆,沈阳 110167 1 引言空间折展机构是指一种为了更好地满足航天器结构大型化发展趋势而产生的具有折叠与展开功能的新型航天装备。由于运载工具容积的限制,空间折展机构在发射过程中处于折叠收拢状态,进入轨道后按控制指令逐渐展开并锁定,具有支撑定位、收集能量、传递信号等一系列作用[1-3]。目前,空间折展机构广泛应用于移动通信、空间科学、军事侦察、导航遥感等领域,具有较高的学术价值、工程需求和应用前景,已经成为国际宇航界研究的前沿和热点之一[4-5]。 按照展开后结构维度的不同,空间折展机构通常分为一维线性折展机构、二维平面折展机构和三维空间曲面折展机构[6]。一维线性折展机构也称为伸展臂[7],是空间折展机构中研究最早、应用最广的结构形式,主要作为大型航天器的支撑和定位结构。二维平面折展机构又称为太阳翼[8],是一种对太阳能进行收集的装置,主要作用是为卫星、空间站等航天器提供能量。三维空间曲面折展机构主要指空间可展开天线[9],是一种具有信息获取和传递功能的航天装备,是空间折展机构中构型最为复杂、研究难度最大的一种结构形式。近年来,随着航天科技的快速发展,各类航天器呈现大型化、复杂化发展趋势,对空间折展机构的需求也越来越多,对展开尺度达几十米、甚至百米及以上级的大型/超大型折展机构的需求尤为迫切[10-12]。传统一体式空间折展机构的展开尺度小、结构耦合性强、扩展性差,难以满足未来空间技术发展的需要。 模块化结构互换性好、灵活性高、拓扑性强,可通过改变模块的数量、类型、排布和组合方式等,实现展开尺度的快速缩放,是满足未来空间折展机构大尺度发展要求的一种较为理想的结构形式。同时,模块化结构良好的通用性,不仅可以有效地降低研制的难度和风险,也可以缩短研制周期、降低研制成本。并且,模块化结构为未来空间折展机构在轨组装和在轨制造等新领域和新技术的发展提供了新的可行性解决方案,具有较大的发展潜力和较为突出的研究价值。 近年来,美国、俄罗斯和欧盟等[13-15]航天大国和组织,分别提出了《国家航天战略》、《2016-2025年俄罗斯联邦航天规划》和《欧洲航天战略》等航天战略和规划,体现了发展航天科技的重要意义;我国作为世界航天大国之一,在《中国制造2025》、“十三五”发展规划以及《全球工程前沿2020》等多个规划和报告中,均将以空间折展机构为代表的新型航天装备列为当前及未来重点研究和发展的领域。因此,有必要对空间折展机构领域的研究进展做一详细综述,为国内相关领域的科研人员提供借鉴和参考。 本文主要围绕具有模块化结构特征的模块化空间折展机构的国内外研究现状进行了概述,分析了典型模块化空间折展机构的构型、特点及应用,结合当前研究及应用存在的不足,对模块化空间折展机构研究的发展趋势进行了展望。 2 国外模块化空间折展机构研究现状2.1 伸展臂按照展开方式的不同,伸展臂可以分为盘压杆式、薄壁管式、套筒式、膨胀硬化式和铰接式等[16]5种类型。其中,前4种类型的伸展臂主要是利用杆件的弹性变形、构件的直径变化以及材料物理属性的改变等实现机构的展开与收拢,结构安装关系上并不具有较为明显的模块化特征。铰接式伸展臂采用刚性构件与转动铰链进行连接,与其他结构形式相比,铰接式伸展臂各构件可以独立拆分与组装,结构拓展灵活,具有高刚度、高精度等特点,应用最为广泛,其结构满足模块化设计特征。本文重点对这类伸展臂进行介绍。 Kitamura等[17-18]针对大型空间可展开天线、空间平台等航天器对伸展臂的需求,以三棱柱为模块单元研制出一种纵杆折叠式伸展臂HIMAT,该伸展臂主要由横杆、纵杆和斜拉索等组成,结构如图1所示。机构中构件之间采用铰链进行连接,通过纵杆的折展实现机构长度的变化,伸展臂采用电机结合丝杠的驱动方式,完全展开后依靠纵杆中部的锁紧机构实现机构刚化。日本在多次的航天任务中使用了HIMAT伸展臂,例如在1996年发射的先进地球观测卫星(advanced earth observing satellite, ADEOS)上使用该伸展臂支撑太阳能电池阵,其长度达到了23.5 m,截面包络圆直径为350 mm,收拢率(收拢率为完全收拢长度与完全展开长度的比值)约为3.3%。
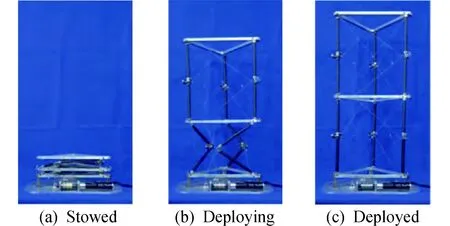
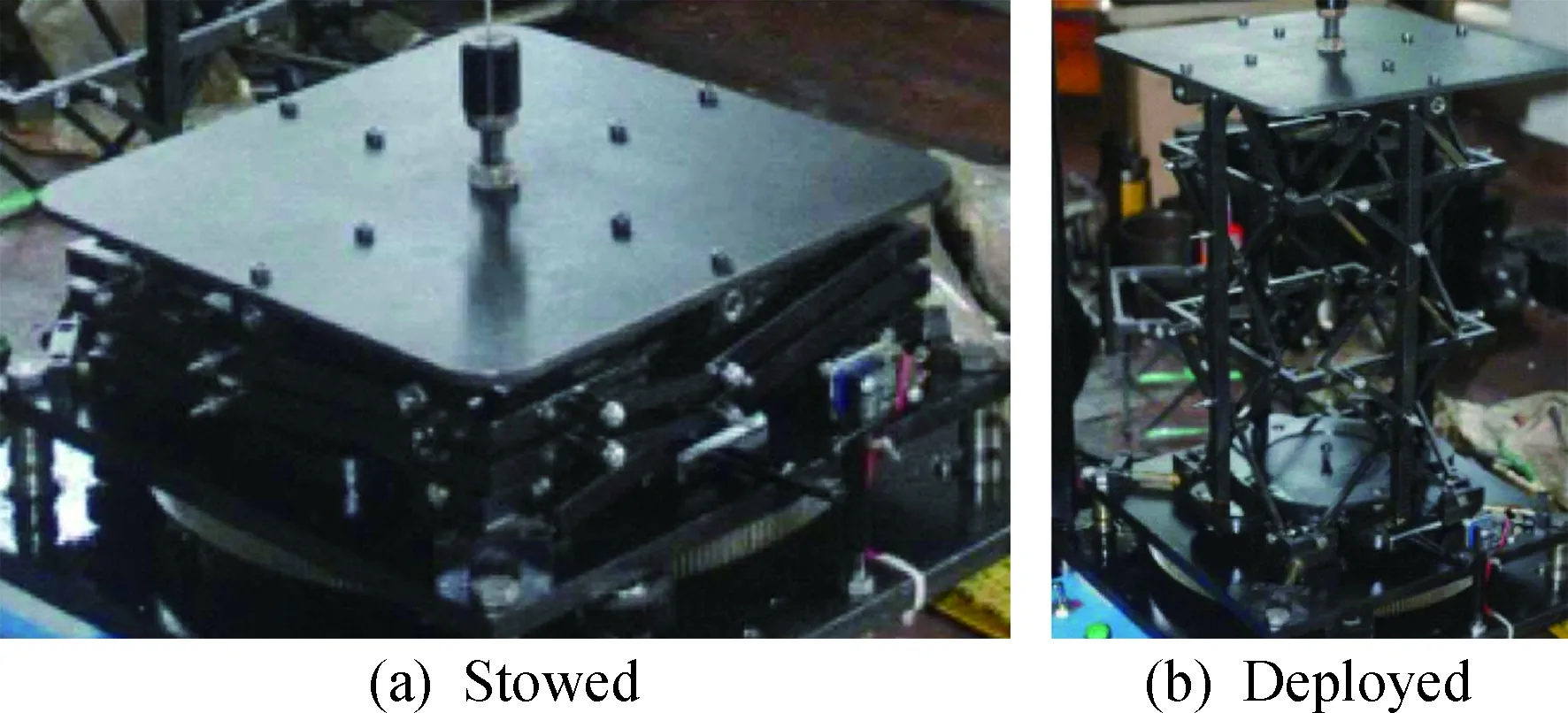
图1 HIMAT伸展臂原理样机Fig. 1 Principle prototype of HIMAT Choi等[19-20]为满足卫星小型化使用要求,提出了一种应用于空间光学望远镜的高精度伸展臂结构方案。该伸展臂以四棱柱作为基本模块单元,主要由上面板、下面板、连接杆和支撑模块等结构组成,通过在连接杆中间设置的弹性铰链驱动机构展开,其结构如图2所示。为了提高结构装配及展开后的精度,设计了专用装配工装,并在由五个非接触式激光位移传感器组成的高精度测量平台上对展开机构的精度进行了试验研究,测试结果表明机构展开精度可以达到微米量级。
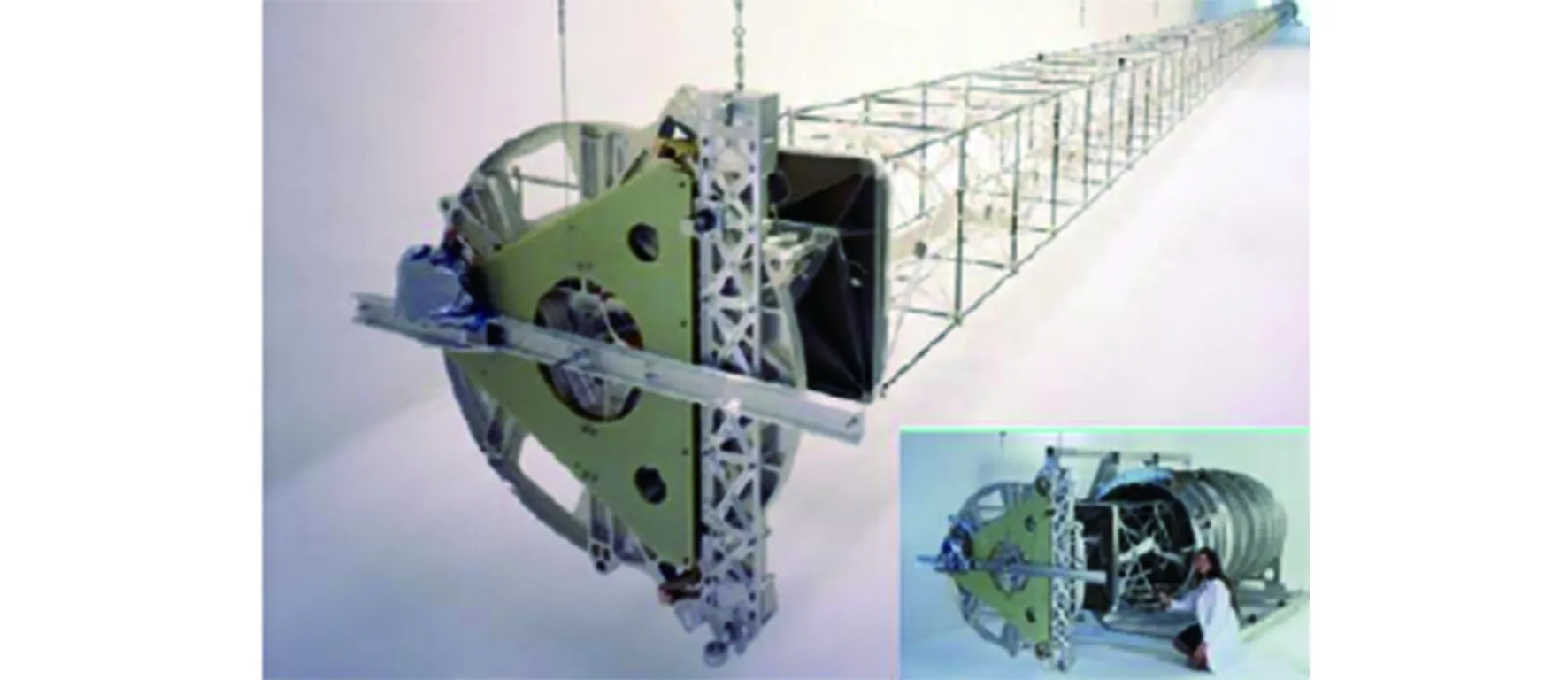
图2 伸展臂展开原理Fig. 2 Working principle of deployable mast 美国AEC-Able公司在伸展臂方面有较为深入的研究和较为丰富的经验[21-22],研制了可折叠铰接式伸展臂(folding articulated square truss, FAST)和索杆铰接式伸展臂(able deployable articulated mast, ADAM),这两种伸展臂均以四棱柱为基本模块单元。 FAST伸展臂[23]主要由横杆、纵杆、斜拉索和铰链等结构组成,如图3所示。纵杆通过其中点的铰链实现纵杆的折叠;横杆包括刚性杆和弹性弓形杆两种,弹性弓形杆与纵杆的中点相连接,通过弹性变形为伸展臂展开提供动力;单元的侧面有两对斜拉索,用于增加伸展臂的扭转刚度和剪切刚度。FAST伸展臂已成功应用在国际空间站上,用于支撑国际空间站的太阳能电池阵。伸展臂直径为1.09 m,展开长度为34.75 m,折叠长度为2.3 m,收拢率为6.6%。
图3 FAST伸展臂Fig. 3 FAST deployable mast 为了满足伸展臂大尺度、高刚度的发展需求,ADAM伸展臂[24]应运而生。ADAM伸展臂主要由纵杆、横杆、斜拉索和球铰等组成,与FAST伸展臂不同,ADAM伸展臂在横杆和纵杆间采用球铰进行连接,并取消了弓形杆,采用在侧面安装特殊的锁紧机构实现结构刚化,如图4所示。2000年,ADAM伸展臂成功应用于NASA的雷达地形测绘任务(shuttle radar topography mission,SRTM)中,该伸展臂的直径为1.12 m,展开长度为60 m,驱动筒长度为2.92 m,收拢率约为4.9%。
图4 ADAM伸展臂Fig.4 ADAM deployable mast 2.2 太阳翼美国ABLE公司[25]研制了一种PUMA太阳翼,其结构如图5所示。该太阳翼采用多个刚性基板折叠的方式实现机构展开,基板为矩形形状,基板的表面上贴装有太阳电池片,基板间采用铰链进行连接。在发射阶段,基板折叠收拢,并压紧在航天器的侧面,进入轨道后,采用同步电机和弹簧铰链驱动使基板缓慢展开。地球同步通信卫星Arabsat 2A上使用了一对PUMA太阳翼,每个太阳翼由四块基板组成,单板尺寸为1.6 m×1.2 m,每板面积约为1.92 m2,该结构刚度高、但质量较大。
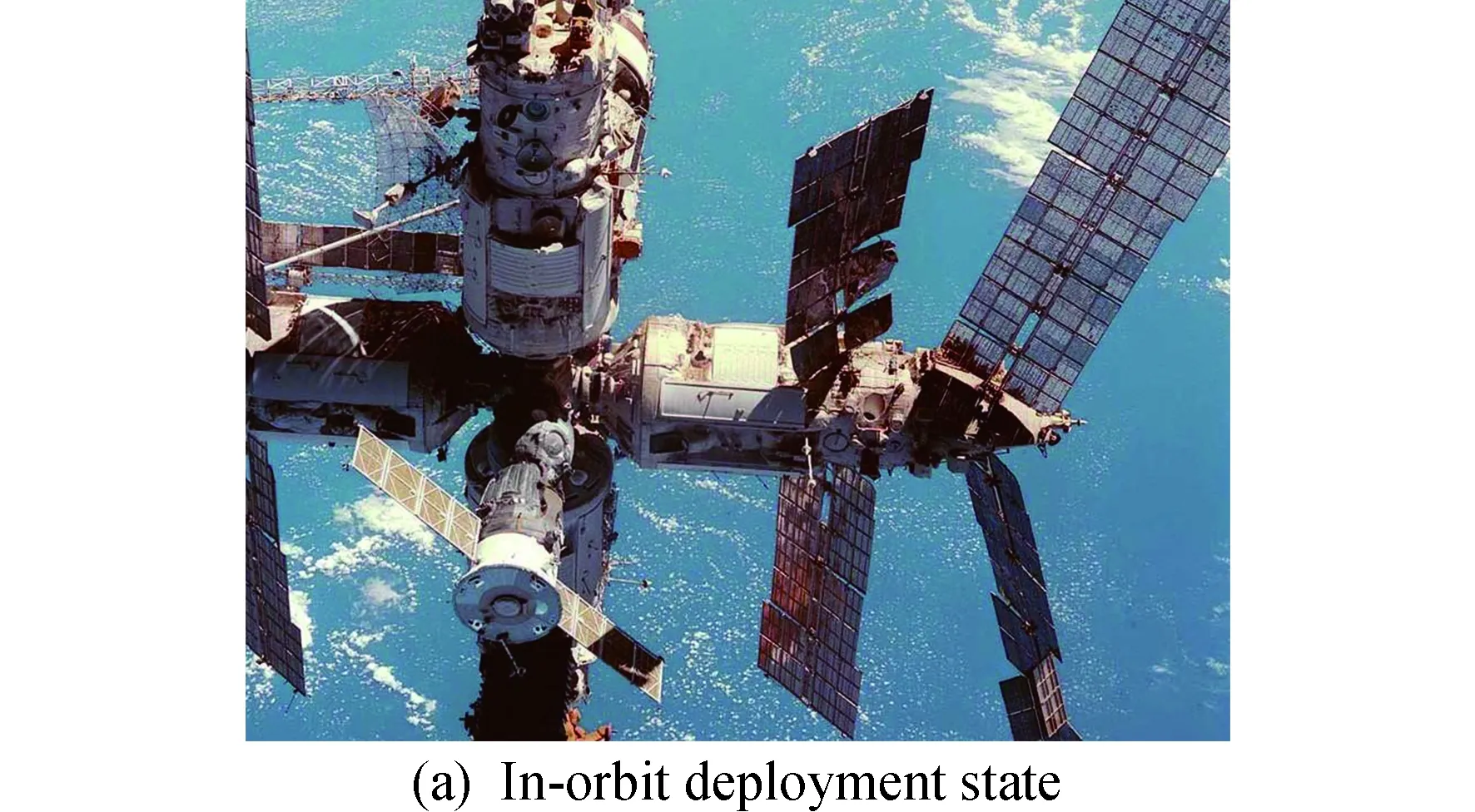
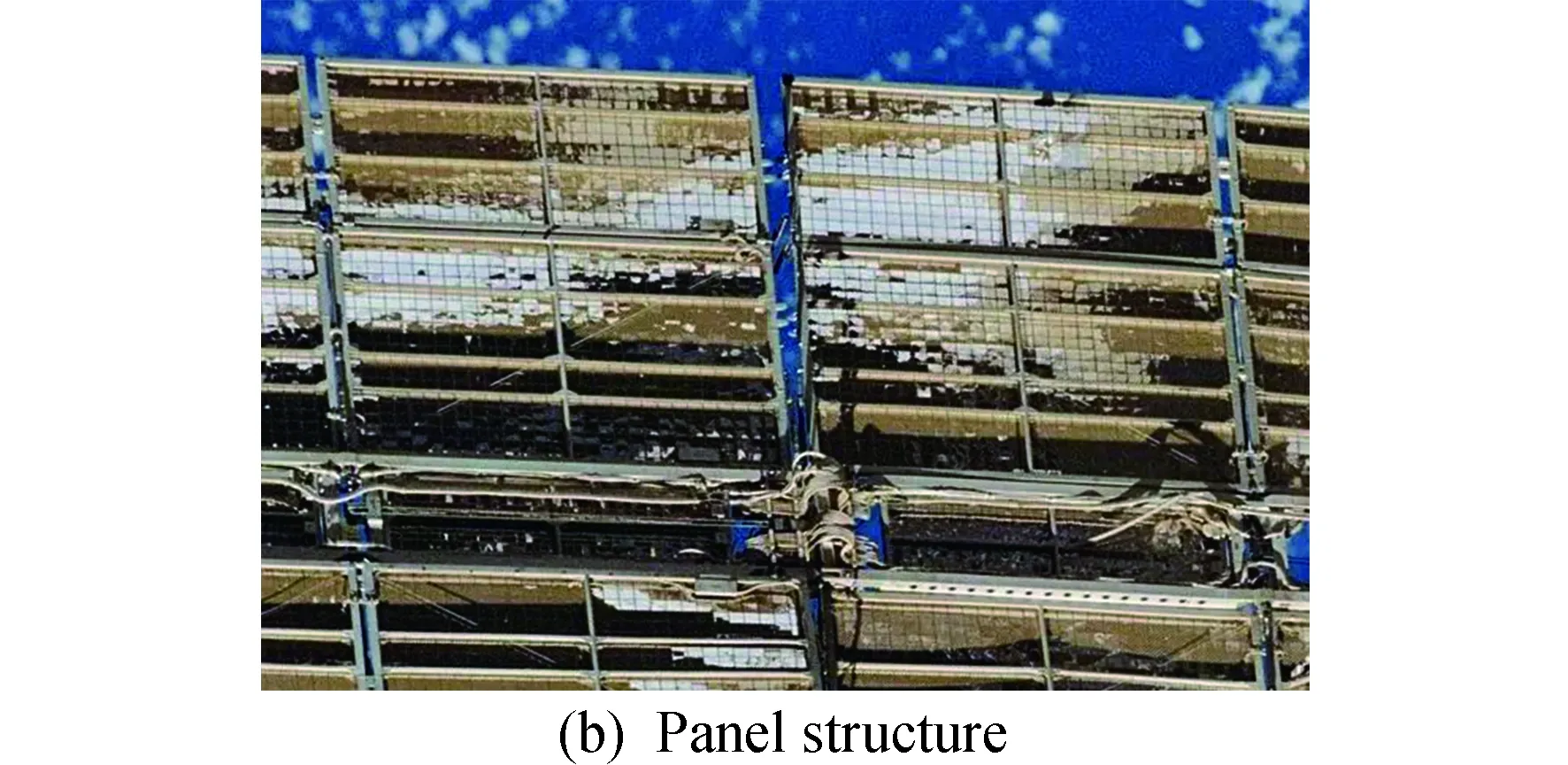
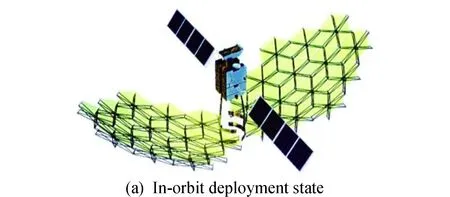
图5 PUMA太阳翼Fig.5 PUMA solar array 俄罗斯在其发射的多颗卫星及和平号空间站(Mir Space Station)上使用了一种质量更轻的半刚性太阳翼[26],在轨展开状态如图6(a)所示。这种太阳翼的基板由碳纤维刚性框架和带有预紧力的柔性玻璃纤维网组成,即该太阳翼是一种刚柔耦合多体系统,面板间的展开采用可回转的铰链进行连接,如图6(b)所示。与刚性太阳翼相比,由于采用了框架结构,电池散热性能更好,输出功率更高,结构的质量也大幅降低。
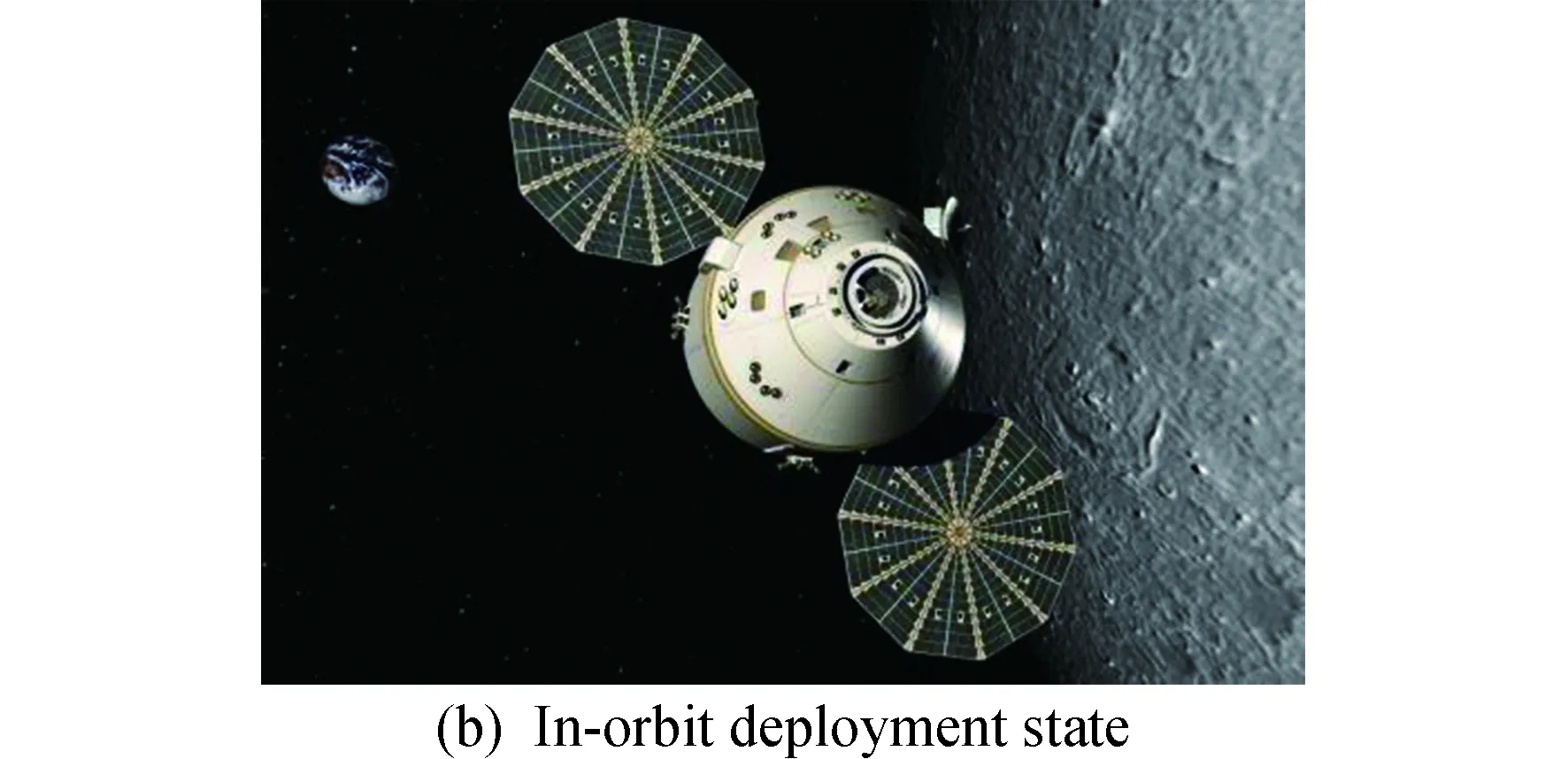
图6 和平号空间站太阳翼Fig.6 Solar array of Mir space station 为了弥补和平号空间站能量收集与供应的不足,俄罗斯和美国共同研制了 (mir cooperative solar array,MCSA)太阳翼[27],并于1996年5月部署在和平号空间站上,该太阳翼集合了两国最先进的航天技术,美国提供高效、轻质量的光伏板模块,俄罗斯提供阵列框架结构和展开机构。整个MCSA太阳翼共有84块电池板,单块电池板的尺寸为2.7 m×0.44 m,单翼展开长度约18 m。 法国阿尔卡特-阿莱尼亚航天公司(Alcatel Alenia Space)在其新一代高功率、大容量地球静止轨道通信卫星平台SPACEBUS上,使用了一种分步展开式太阳翼[28],如图7所示。太阳翼采用十字布局构型及无源展开技术,面板间采用成熟的铰链结构实现展开,该展开方式在满足载荷舱容积的前提下,保证了展开后的面积,并且具有结构拓展灵活的特点。该太阳翼已在Arabsat2,Thaicom3,Sirius2,Agila和Eutelsat3等卫星上获得了广泛应用。 美国ATK公司于20世纪90年代研制出一种UltraFlex太阳翼[29-31],如图8所示,该太阳翼主要由柔性三角形薄膜片、中心轮毂、压紧带、展开机构等组成,展开原理与折扇相似,依靠位于结构中央的扭簧驱动展开,展开后呈圆形,半展开状态如图8(a)所示。UltraFlex太阳翼在美国NASA的火星01探测器、“凤凰号”火星探测器、“洞察号”火星探测器、“猎户座”多用途飞船、“天鹅座”飞船等多项航天任务中获得应用,其中在“猎户座”飞船上使用的太阳翼最大,展开后直径达到了6 m,如图8(b)所示。
图8 UltraFlex太阳翼Fig.8 UltraFlex solar array 为了满足大功率航天器的使用需求,ATK公司在Ultraflex太阳翼的技术基础上,研制出一种收拢率更高、展开面积更大的MegaFlex太阳翼[32-33],如图9所示,该机构通过增加薄膜片折叠的次数,大幅提升了结构展开后的面积,MegaFlex太阳翼展开后的直径达到9 m,该太阳翼已成功应用到“天鹅座”货运飞船等航天任务中。
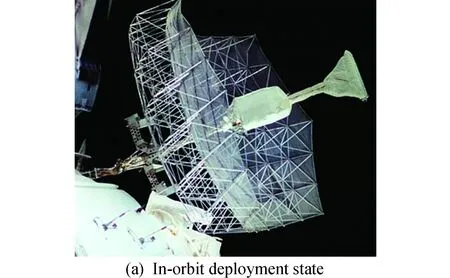
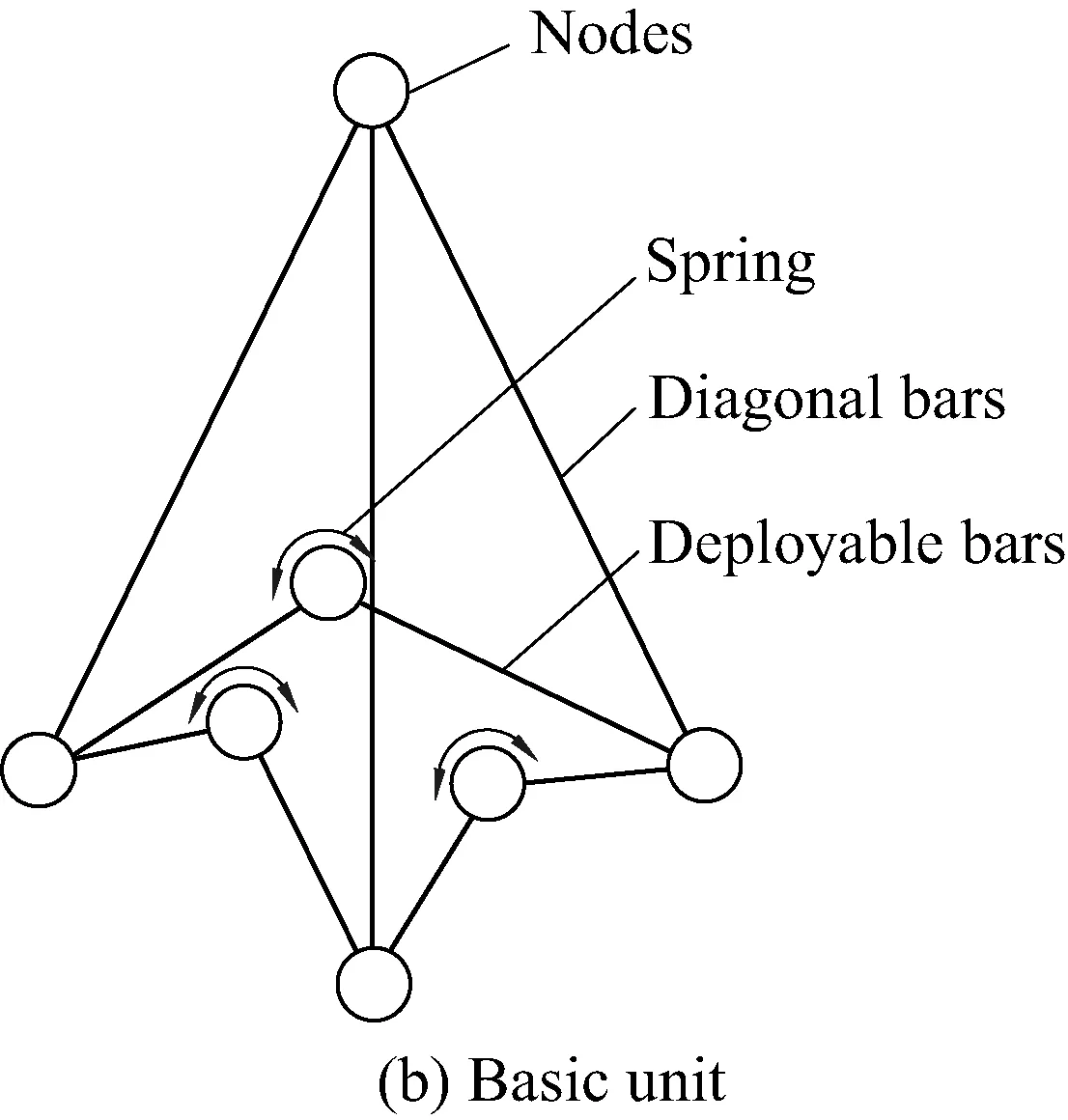
图9 MegaFlex太阳翼Fig.9 MegaFlex solar array 2.3 空间可展开天线俄罗斯在和平号空间站上使用了一种构架式展开天线[34],如图10(a)所示。该天线以四面体为可展模块单元,相邻的四面体模块间采用相互倒置方式进行连接,其结构如图10(b)所示。每个模块包含3个腹杆、3个可折叠杆及节点等结构,构件间采用铰链进行连接,在折叠杆的铰链处安装有涡卷弹簧。收拢时,构件压缩弹簧而储存弹性势能,展开时,弹簧释放弹性势能,进而驱动机构展开。
图10 四面体构架式可展开天线Fig.10 Deployable tetrahedral truss antenna 俄罗斯Georgian公司[35-36]设计出一种环形剪叉式可展开天线,如图11(a)所示。该天线由剪叉式环形可展开支撑机构和从中心轮毂上辐射出的张拉膜肋等组成。支撑机构为天线的骨架,由若干个剪叉机构单元串联而成,如图11(b)所示。1999年,俄罗斯在和平号空间站上对一个口径为5.6 m×6.4 m的环形剪叉式天线进行展开测试。该天线收拢后的直径和高度为0.6 m×1.0 m,天线的总质量为35 kg。
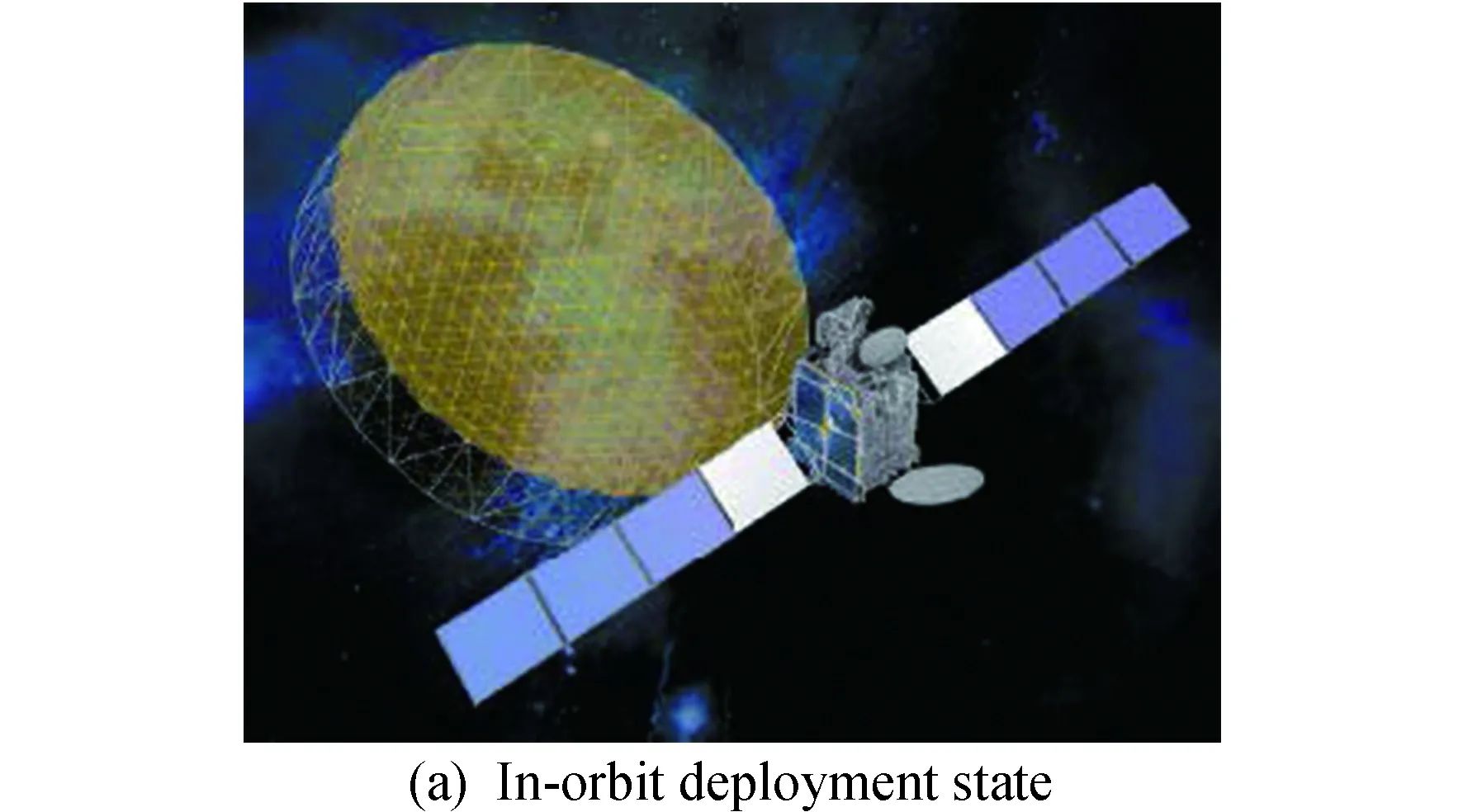
图11 环形剪叉式可展开天线Fig.11 Circular scissor deployable antenna 美国Astro Aerospace公司研制出一种环形桁架式可展开天线[37],该天线由可展环形桁架、前索网、后索网、拉索、金属反射网组成,如图12(a)所示。环形桁架是天线的支撑结构,由若干个对角杆长度可变的四边形单元组成,如图12(b)所示。前、后索网安装在环形桁架上,索网间的竖向拉索具有一定的预紧力,索网在预紧力的作用下逼近抛物面形状,金属反射网附着于前索网上。2000年底,美国发射的Thuraya卫星上携带了一个口径为12.25 m 环形可展天线,质量为55 kg,收拢时直径和高度分别为1.3 m×3.8 m。
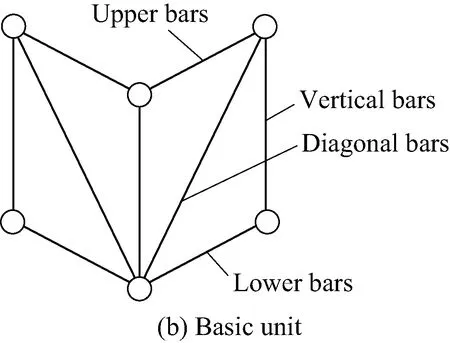
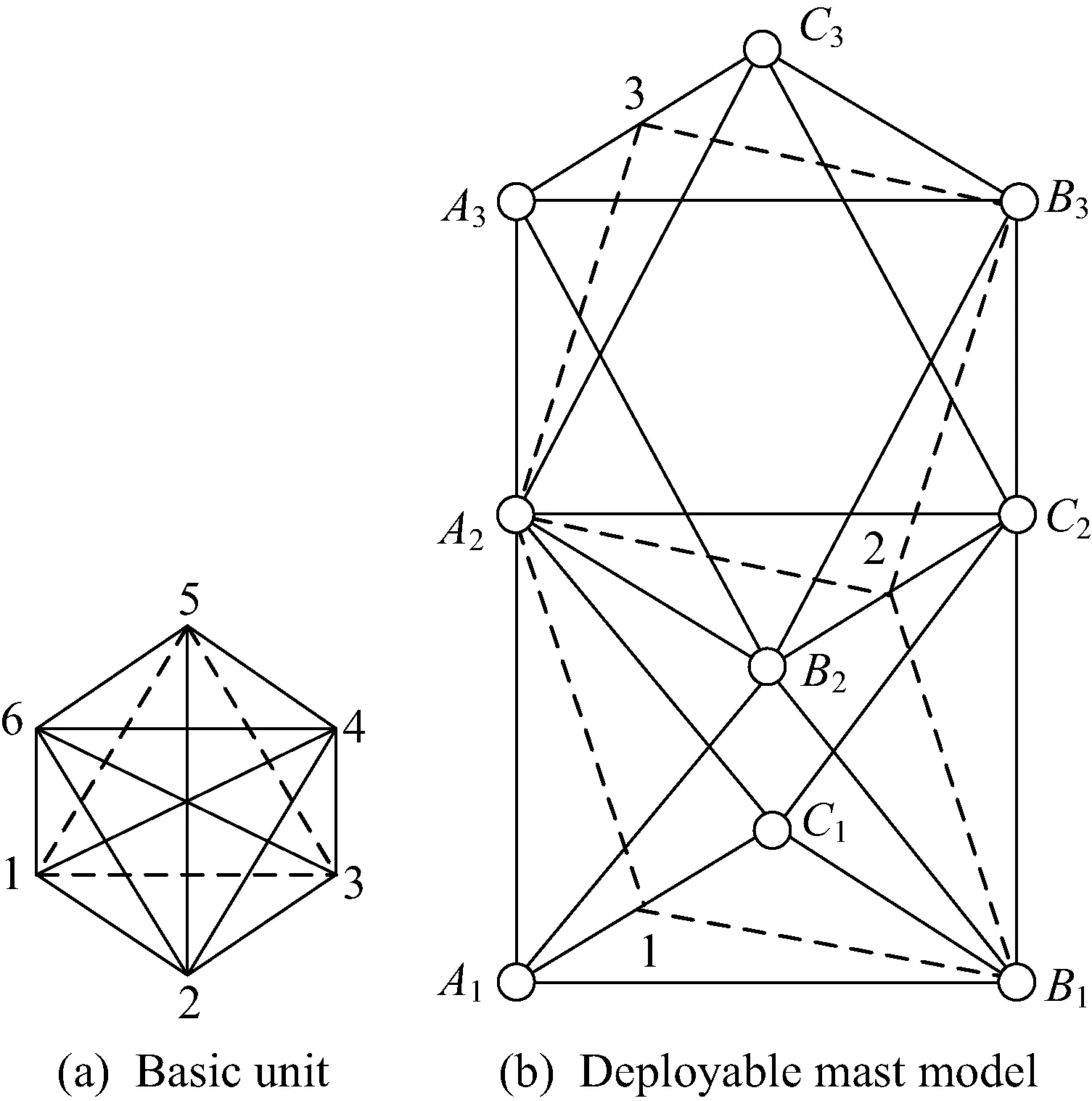
图12 AstroMesh可展开天线Fig. 12 AstroMesh deployable antenna 日本宇宙航空研究开发机构(Japan Aerospace Exploration Agency,JAXA)为工程试验卫星ETS-Ⅷ研制出一种构架式可展开天线,2006年12月,该卫星成功发射,并携带了两架有效口径为13m的构架式可展开天线[38-40],如图13(a)所示。两个天线分别负责信号的发射和接收,同时也可以避免多个频率在一个天线上引起的信号干扰。天线由14个直径为4.8 m的六棱柱模块组成,每个模块由6个基本单元通过周向均布阵列形成,基本单元采用弹簧作为动力源,依靠弹簧被压缩时储存的弹性势能驱动滑块移动,从而带动机构展开,基本单元结构如图13(b)所示。收拢后,结构的高度和直径分别为4 m×1 m,天线总质量为170 kg。由于采用六棱柱蜂窝状构型,结构具有较好的可扩展性。
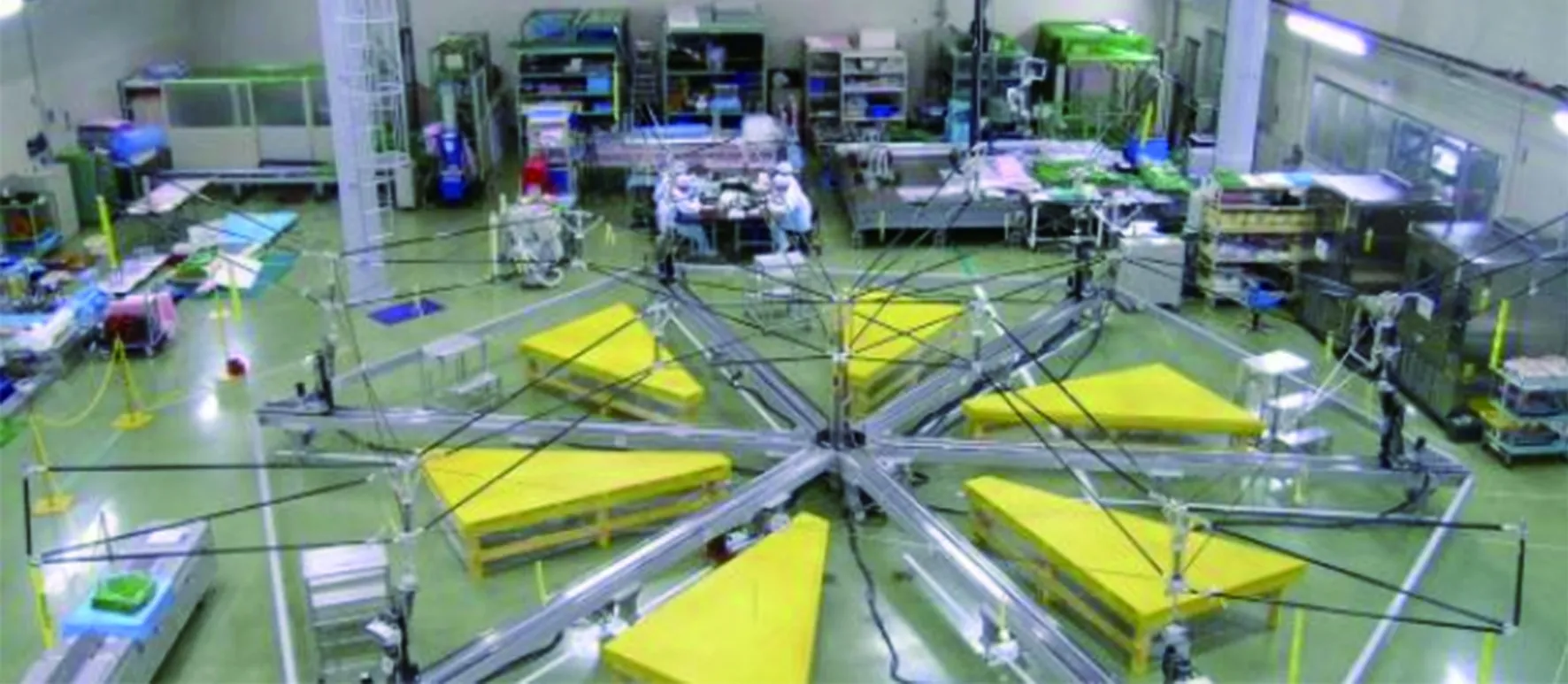
图13 ETS-VIII的构架式可展开天线Fig. 13 Deployable truss antenna of ETS-VIII JAXA[41-42]为满足通信卫星对大口径可展开天线的需求,在ETS-Ⅷ基本单元结构的基础上提出一种三折叠肋式可展开天线,该天线由7个六棱柱模块组成,每个模块包括6个可折叠肋单元,该构型有效地提高了结构的收纳率,并减轻了结构质量。每个模块展开后的尺寸为14.4 m,整体展开后的口径达到30 m,收拢后的直径和高度分别为1.8 m×4 m,单模块样机如图14所示。
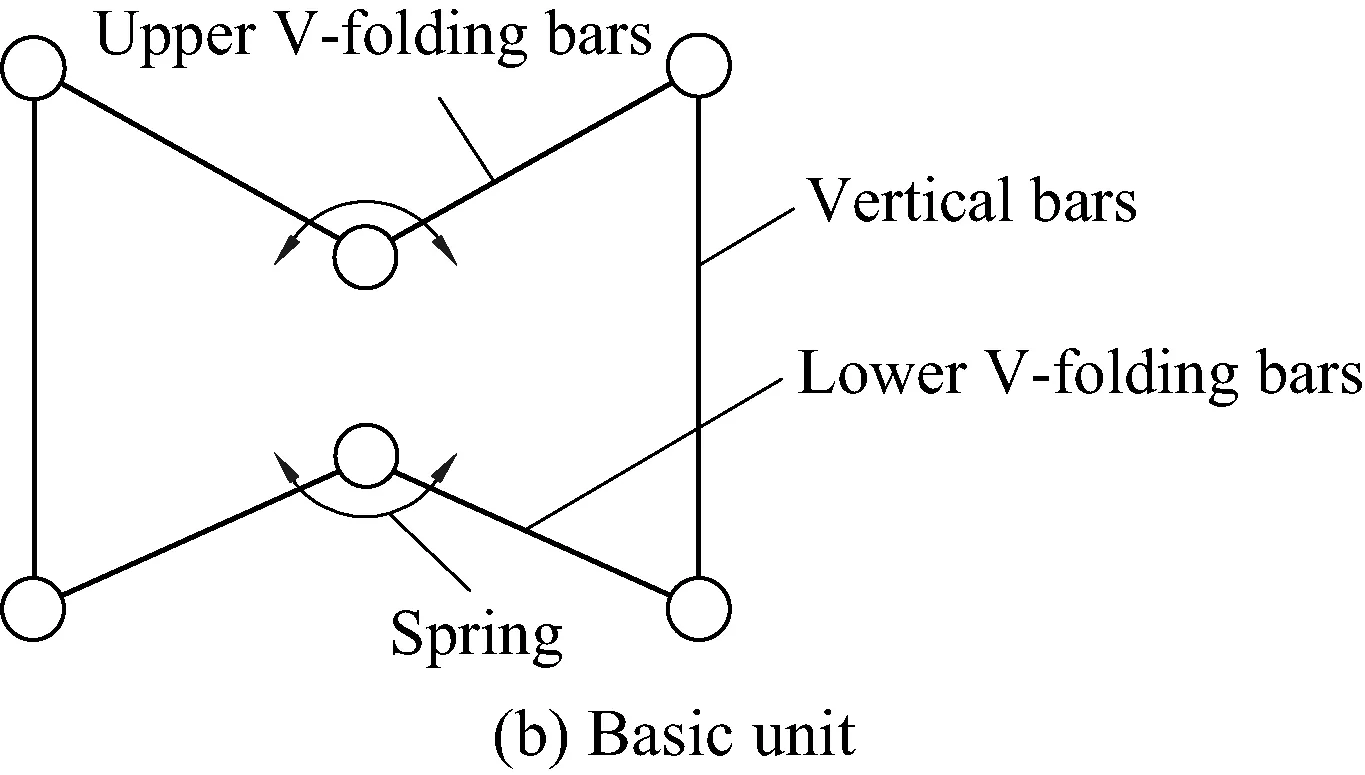
图14 三折叠肋式可展开天线模块单元Fig.14 Module unit of three-fold rib deployable antenna 欧洲太空局(European Space Agency,ESA)和格鲁吉亚工业大学(Georgian Technical University,GTU)等多家研究机构联合研制了一种圆锥环形可展开天线[43-44],天线展开后的尺寸为6 m,圆锥环形可展开天线的原理样机如图15(a)所示。天线由若干个梯形模块组成,每个模块包括上V形折叠杆、下V形折叠杆、竖杆、同步铰链、驱动弹簧、斜拉索等结构组成,机构简图如图15(b)所示。
图15 圆锥环形可展开天线Fig. 15 Cone ring deployable antenna 3 国内模块化空间折展机构研究现状中国在模块化空间折展机构研究方面起步较晚,但近十几年来取得了较为快速的发展,在国家航天项目的牵引下,多所高校和科研机构开展了较为广泛而深入的研究,模块化折展机构及应用取得了可喜的进步和成绩。 3.1 伸展臂单明贺等提出一种三棱柱构架式伸展臂[45-46],该机构以三棱柱为基本展开单元,基于增加虚约束的Sarrus机构进行设计,模块单元主要由刚性三角框架、上折叠臂、下折叠臂、对角拉索等结构组成,如图16所示。锁紧机构布置在上/下折叠臂的中间位置,采用电机结合丝杠的驱动方式,机构展开后对角拉索张紧,用以提高结构的刚度。该伸展臂展开长度约为5 m,收拢后长度为0.7 m,截面包络圆的直径约为0.58 m。
图16 三棱柱构架式伸展臂原理样机Fig.16 Principle prototype of triangular prism frame deployable mast 杨慧等提出一种含超弹性铰链的三棱柱伸展臂[47-48],该伸展臂同样以三棱柱为模块单元,主要由纵杆、绳索、三角形框架、套管和超弹性铰链等组成。每个模块含有3组纵杆,每组纵杆中安装1对超弹性铰链。收拢时,超弹性铰链弯曲,储存弹性势能;展开时,超弹性铰链恢复变形,从而驱动机构展开。设计的一个包含10个模块的结构方案,其展开后的长度为5.3 m,收拢后长度为0.48 m;研制的包含2个模块单元的原理样机,如图17所示。
图17 含超弹性铰链的三棱柱伸展臂原理样机Fig. 17 Principle prototype of triangular prism deployable mast with super elastic hinge 高明星等提出一种可展开三棱柱式伸展臂[49],该伸展臂主要由纵杆、横梁、张力索以及铰链等组成。纵杆材料采用碳纤维,横梁与各个铰链材料采用铝合金,利用弹簧驱动方式展开。伸展臂的杆件主要起支撑作用,展开后张力索张紧,可以提高整个伸展臂的刚度。为了研究该伸展臂的动力学特性,设计并研制了含有2个模块单元的三棱柱伸展臂原理样机,如图18所示,其展开后长度为1.2 m,收拢高度为0.1 m,外包络圆直径为0.5 m。
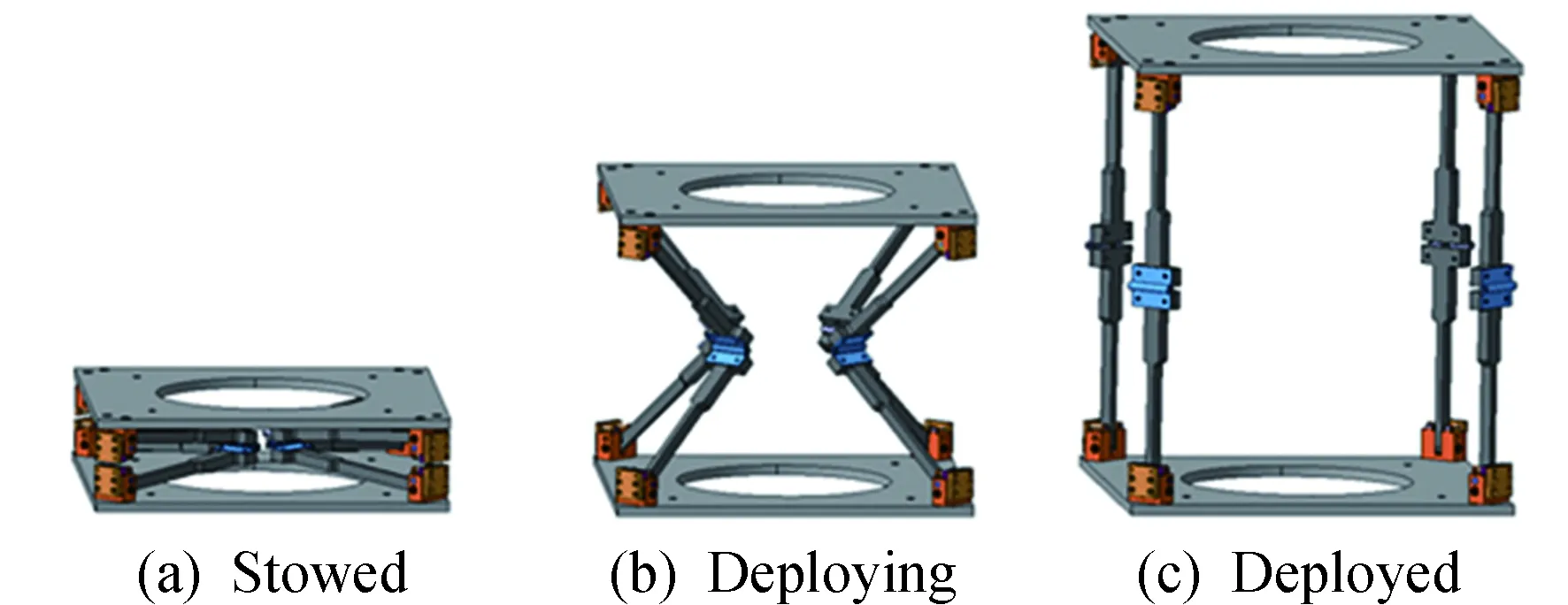
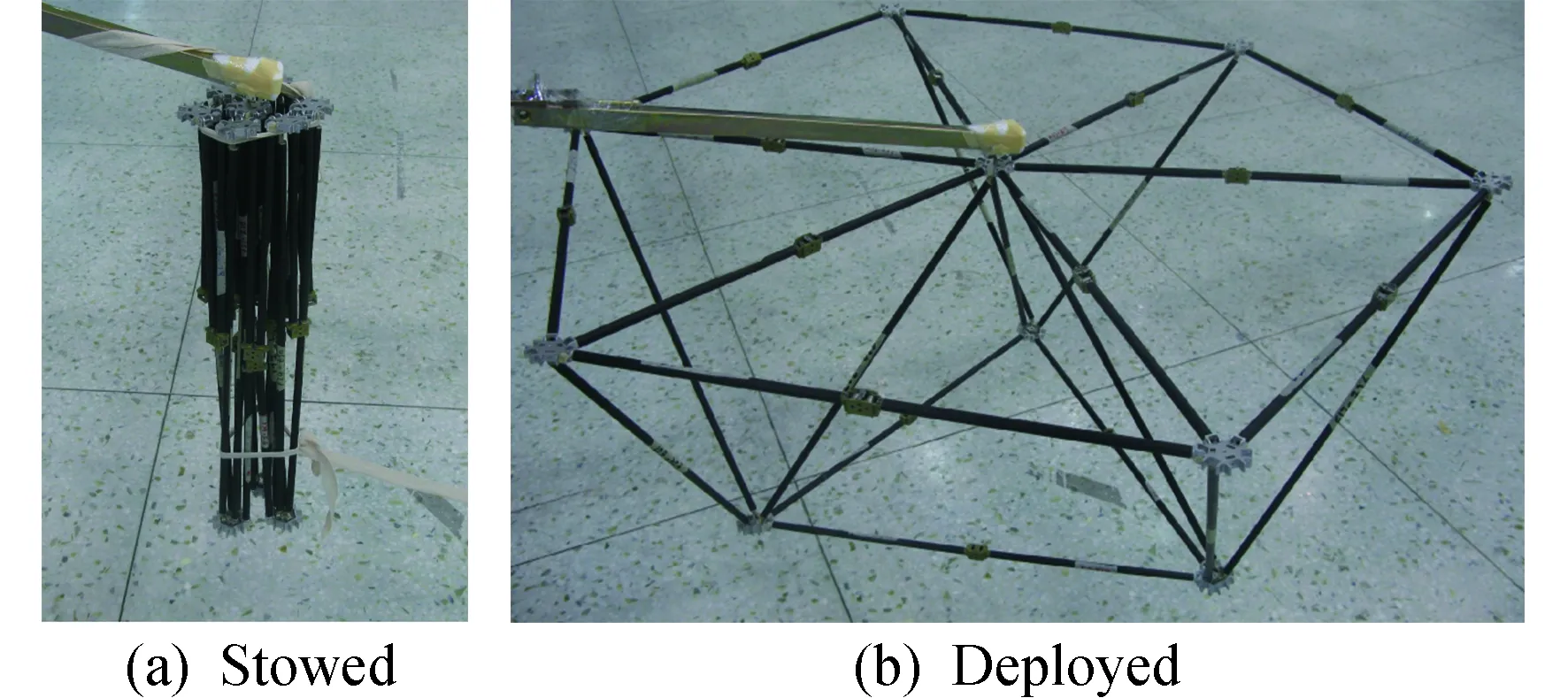
图18 三棱柱伸展臂原理样机Fig. 18 Principle prototype of triangular prism deployable mast 郭宏伟等[50-51]以四棱柱为模块单元研制了一种索杆铰接式伸展臂。该伸展臂由纵杆、横杆、角块、球铰、拉索和锁定装置等结构组成,如图19所示。横杆通过角块连接成刚性平面,纵杆通过球铰将上、下两个刚性平面连接成一个模块单元,上、下刚性平面可以相对伸展臂轴线转动实现展开和收拢,完全展开后锁定装置将机构锁紧。研制了一个由20个单元组成的伸展臂原理样机,展开后长度为7.1 m,收拢率为4.6%。
图19 索杆铰接式伸展臂原理样机Fig.19 Principle prototype of space cable-strut deployable articulated mast 徐国民等以四棱柱为模块单元研制了一种剪叉式空间伸展臂[52]。单个模块单元由4根直角横杆和8根剪杆组成,4根直角横杆通过凸榫和凹卯首尾相连接形成正方形框架,每个剪式铰的两端铰接在正方形框架的一边内侧壁上,机构采用电机驱动,通过锁定滑板中的圆柱销实现各级剪叉单元的逐级互锁,研制的原理样机如图20所示。
图20 剪叉式伸展臂Fig. 20 Scissor deployable mast 陈务军等对八面体桁架单元及其派生系所构成的空间伸展臂进行了研究[53-54]。基于空间机构学和拓扑理论,提出了5种八面体及其派生桁架单元,开展了基本单元结构特征评价。八面体基本单元主要由杆件、主动索、被动索等组成,结构展开后形成一个杆件受压、索受拉的自平衡张力体系。并基于该正八面体单元提出了一种伸展臂方案,该伸展臂展开长度为4.4 m,收拢后高度为0.3 m,模块单元及部分展开模型如图21所示。
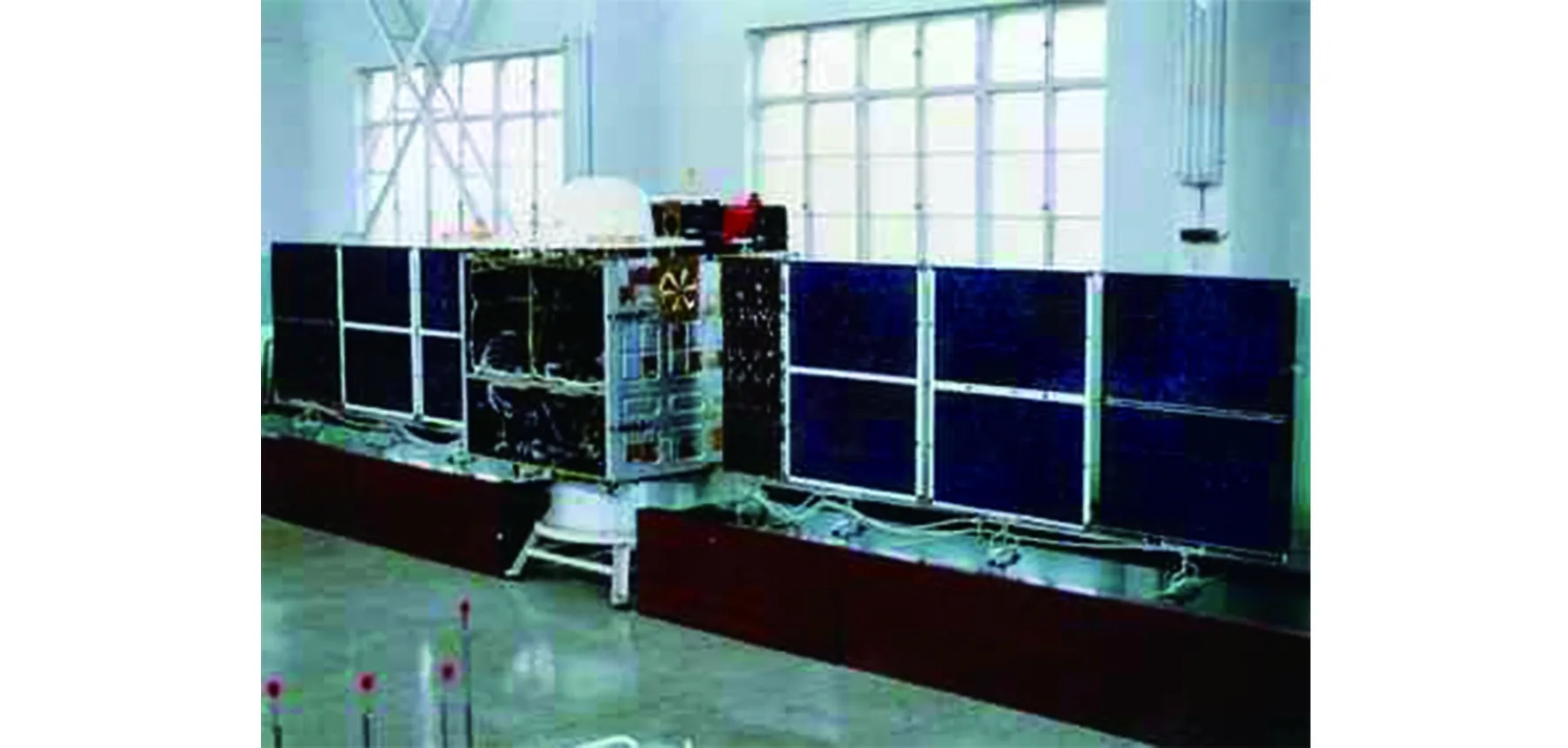
图21 正八面体单元伸展臂Fig.21 Mast of octahedral truss 3.2 太阳翼风云一号卫星是中国研制的第一代准极地太阳同步轨道气象卫星,主要任务是进行天气预报、气候预测和全球环境监测等。风云一号气象卫星上均采用了折叠式太阳翼。其中FY-1A卫星[55]本体外侧各安装了三块太阳能面板,单板的尺寸约为1.2 m×1 m,如图22所示。FY-1D卫星于2002年5月发射,共包含2个太阳翼,太阳翼对称安装在星体外侧,每侧包含4块面板,展开后总长度为10.5 m。
图22 FY-1A卫星的太阳翼Fig.22 FY-1A solar array 东方红三号卫星[56]是中国第一代采用三轴稳定技术的通信卫星,它包含两个可展开式太阳翼,每翼由连接架、太阳板、展开机构和压紧释放机构等组成,基板以铝蜂窝为芯层,以碳纤维为面板的夹层结构,基板间采用铰链进行连接,并由涡卷弹簧提供驱动力,完全展开后翼展达到18.1 m,结构如图23所示。
图23 东方红三号卫星的太阳翼Fig.23 DFH-3 solar array 2011年9月,我国发射了第一个空间实验室——天宫一号[57],天宫一号上使用了两个半刚性太阳翼,太阳翼采用了以玻璃纤维为主要材料的矩形半刚性基板和发电效率更高的三结砷化镓电池片,每翼包含4片太阳能板,整翼展开后的总长约为18 m,如图24所示。
图24 天宫一号上的太阳翼Fig.24 Tiangong-1 solar array 实践二十号卫星[58-59]上携带了两个展开面积最大,翼展最长的太阳翼,每个太阳翼由6片太阳能板构成,其中横向4片,纵向2片。首次采用了二维二次展开方式,展开后两边各呈十字状布局,整颗卫星太阳翼展开后的长度约为40米,如图25所示。
图25 实践20号卫星太阳翼Fig.25 SJ-20 solar array 简世康等基于传统折扇原理,对扇形太阳翼进行了研究[60],开展了同步机构、自锁铰链和驱动机构等结构方案设计,并采用多体动力学软件对机构进行了运动学及动力学仿真和分析。 左锡远等基于折纸机构,开展了折纸太阳翼构型研究[61],对基板、连接架、锁紧机构等功能模块进行了设计,提出了该机构运动学分析等效方法,并建立了刚柔耦合动力学模型。 廖波等为满足多任务载荷对低轨微型卫星的需求,发明一种模块化微型卫星平台[62],该卫星两个侧面各有1个太阳翼,每翼由两个基板组成,每个基板采用内嵌高强度碳纤维复合材料框架和铝蜂窝夹层结构,尺寸为0.28 m×0.5 m,基板采用铰链连接,电机驱动。 3.3 空间可展开天线关富玲等研制了一种四面体构架式可展开天线[63-64]。该天线以四面体模块为基本单元,每个模块由6个杆件和4个十字花盘形铰链组成,6个杆件里有3个腹杆不可折叠,另外3个杆件的中部安装有驱动铰链,在铰链上安装有涡卷弹簧,利用机构折叠时,弹簧储存的弹性势能驱动机构展开。研制了一个缩比原理样机,展开状态下的口径和高度为2.1 m×0.58 m,收拢状态的直径和高度为0.09 m×0.55 m,其结构如图26所示。
图26 可展开桁架天线样机Fig. 26 Principle prototype of deployable truss antenna 田大可等提出了一种模块化构架式可展开天线[65-66],如图27所示。该天线由7个六棱柱模块单元组成,每个模块又由6个以模块为中心,呈辐射状均布的肋单元组成,肋单元是最小的模块单元。在模块的中心杆上安装有主驱动弹簧,在下弦杆上安装辅助驱动弹簧。设计了展开缓释装置,通过电机控制机构展开的速度。所研制的原理样机展开尺寸为3.1 m×3 m,收拢后的直径和高度约为0.3 m×0.7 m。
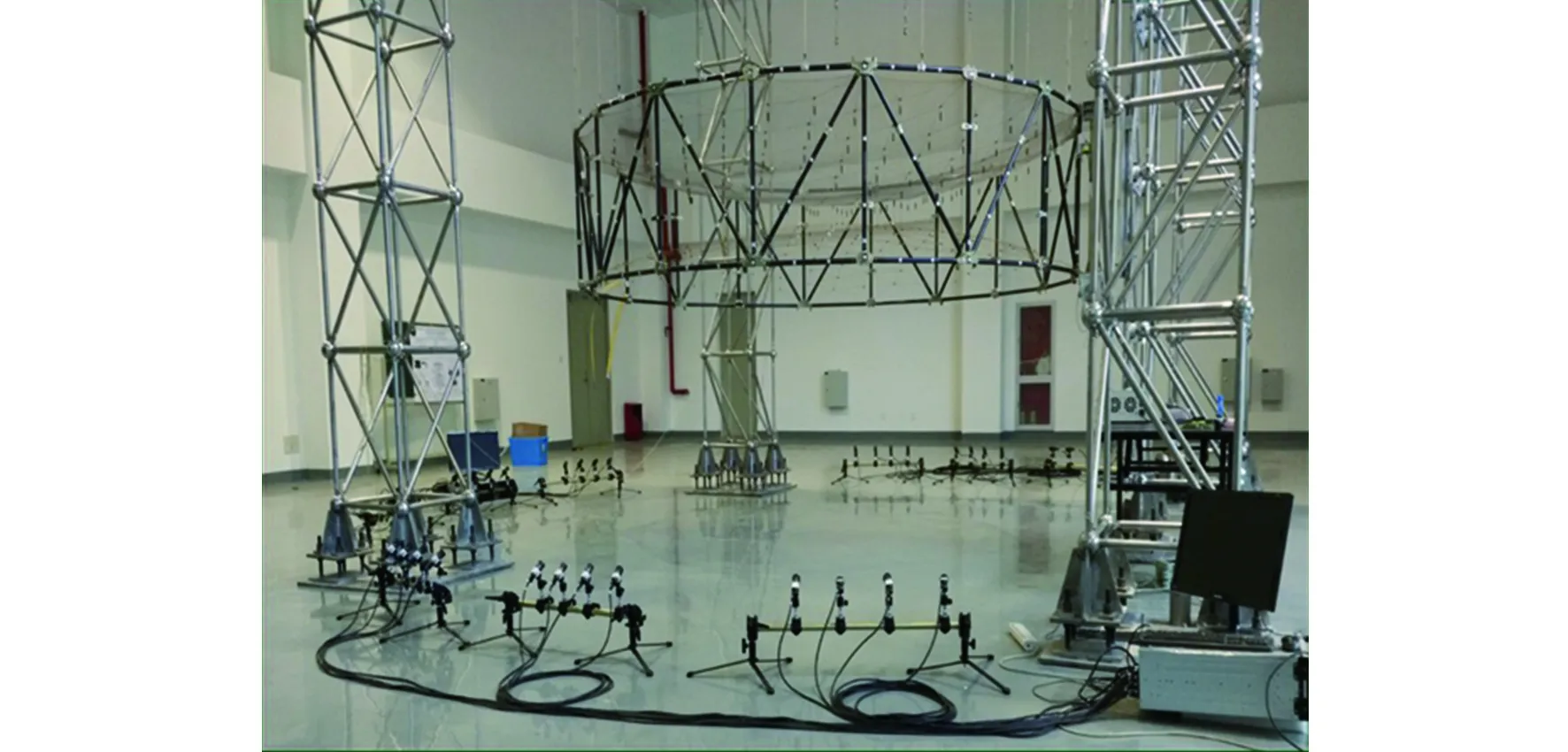
图27 模块化构架式可展开天线样机Fig. 27 Principle prototype of modular deployable truss antenna 史创等提出一种双层环形桁架式可展开天线[67-68]。该机构由内、外两层环形桁架机构、连系桁架机构和索网反射面等结构组成,内、外层可展开机构均由曲柄滑块式机构模块组成,在每层机构内部安装有弹性铰链和圆柱弹簧,作为机构的动力源。连系桁架机构用于实现内外层机构的联动,从而保证双层环形天线实现展开与收拢。为了研究机构的特性,研制了一个展开口径为2 m的单层环形桁架机构样机,如图28所示。
图28 单层环形桁架机构样机Fig.28 Principle prototype of single-layer ring deployable antenna 北京理工大学与中国空间技术研究院西安分院联合研制了一种空间环形桁架式可展开天线[69-70],如图29所示。该天线以平行四边形机构为模块单元,主要由横杆、竖杆、斜腹杆及拉索等组成,利用四边形对角线可伸缩的特点,采用电机收回斜腹杆内部的拉索而实现机构展开。2015年9月,该天线成功应用到我国通信技术试验卫星一号,天线展开后的口径为15.6 m,天线成功展开,工作状态良好。
图29 环形桁架式可展开天线Fig. 29 Hoop deployable truss antenna 郭金伟等基于3RR-3RRR四面体组合单元和基于3RR-3URU四面体对称组合单元分别提出了两种新型模块化可展开天线机构[73-74],应用螺旋理论和G-K公式计算了机构的自由度,并进行了动力学数值仿真分析,最后研制了一套基于3RR-3URU四面体对称组合单元样机,如图30所示。
图30 模块化可展开天线机构Fig.30 Modular deployable antenna mechanism 4 模块化空间折展机构发展展望随着空间科学技术及应用的不断发展和深入,空间折展机构在各项航天工程中必将发挥日益重要的作用。因此,结合国内外此领域的研究进展,对模块化空间折展机构未来的发展提出以下展望。 4.1 机构创新设计方法空间折展机构是机构学的一个重要分支,是机构学在航天领域的新发展和新应用。现有模块化空间折展机构的构型大多为桁架式刚性、半刚性结构,模块的形状主要有三棱柱、四棱柱、四边形、四面体和六棱柱等,构型的种类和数量较少,结构质量体积比较大,难以满足未来的发展需求,还需要在以下几个方面开展深入研究。 1)机构综合方法。机构综合是机构创新的动力和源泉,针对模块化结构和宇航空间机构的特点,从结构综合、运动综合和动力综合等方面开展系统性研究,提出满足模块化空间折展机构要求的收纳率更高、拓扑特性更好的新的机构综合方法。 2)轻量化设计。现有桁架式折展机构可以保证机构展开后具有较高的强度和刚度,但随着机构大型化发展,结构本体的质量将急剧增大。因此,应深入开展柔性材料、薄膜材料、智能复合材料等新材料的研究和应用。同时,采用现代仿生智能优化算法等开展结构及动力源配置的优化研究。 3)多构型模块组合设计。三棱柱和四棱柱模块化折展机构具有单项拓扑性好、展开刚度高等优点,四面体和六棱柱模块则利于发展成三维空间曲面机构。随着航天任务趋于复杂化,必将要求未来的折展机构具有多功能和高效率属性,因此,应将各构型模块有机联系起来,更好地发挥各自的优点,将不同构型进行组合,开展多构型模块组合设计。 4.2 地面微重力试验及仿真模块化折展机构按照展开后结构的维度分为3个大的类型,每个大类又包括若干种构型。目前在地面微重力系统设计和模拟试验方面多采取定制方式开展,使得研制成本较高、周期较长、通用性较差。同时,未来折展机构的尺度将朝着百米级、公里级方向发展,对地面微重力模拟研究提出了更加严峻的挑战,以下几个方面值得进一步研究。 1)模拟系统集成化设计。深入挖掘各类型模块化折展机构在展开原理、拓展规律、锁定方案等方面的联系,系统性地开展微重力模拟系统的设计,使其尽可能多的兼容不同大类、不同构型模块化折展机构的使用需求,建立具有通用性好、扩展性强、模拟精度高的微重力模拟综合试验平台。 2)缩比验证研究。随着模块化折展机构大型化发展,微重力模拟系统的尺寸也将随之增大,如何开展系统设计,并保证试验的准确性将变得非常困难。因此,应先在缩比样机方面开展研究,提出折展机构结构缩放设计方法,同时,可以在建立等效机构模型、子模型、子系统以及半物理试验等多个方面开展研究。 3)系统仿真研究。模块化折展机构的研制及试验是研制任务中最重要、最有说服力的一个环节,但它具有后验性,若发现重大问题将影响整个项目的进度和成败。因此,应在项目研制初期的方案论证和方案设计阶段开展系统仿真研究,对复杂系统进行简化,提出满足精度要求的、快速的系统仿真方法,建立系统仿真模型,尽早发现机构方案中存在的颠覆性问题,保证项目顺利实施。 4.3 空间在轨装配技术随着航天技术的快速发展,大型化成为空间折展机构的一个重要发展方向,诸多重大航天工程对展开尺度为几十米、上百米,甚至数百米的空间折展机构的需求变得非常紧迫。在轨装配技术是实现低成本、高效率、快速部署航天器的有效途径之一,是推动大型、超大型航天器发展和应用的重要手段。美国、欧空局等航天大国已将其作为未来航天器发展的一项关键技术。模块化空间折展机构其结构独立性强、标准化程度高、通用性及互换性好,为实现在轨装配提供了有利条件,但目前技术尚不成熟,还需要开展以下探索研究。 1)快速装/拆结构设计技术。大型模块化空间折展机构在轨装配必将是无人参与的自主装配,需要研究可以实现结构快速装配、拆卸的连接接口,并保证接口结构简单、连接可靠,同时应具有一定的防错、容错及调整能力。 2)空间机械臂设计技术。空间机械臂是实现模块化空间折展机构在轨装配的一种关键的航天装备,研究与模块化空间折展机构构型、尺度相适应的,具有工作半径大、定位精度高、操作灵活性好、自主分析能力强的空间机械臂主臂结构。研究单臂多手、多臂多手及刚柔复合手等智能化、集成化新型机械手爪技术及可靠、稳定抓捕方法。 3)装配层级和逻辑研究。模块化空间折展机构模块数量多、拓扑关系复杂,在装配过程中,需要研究如何划分结构装配的层级,例如可以划分为单模块、单构型成组、多构型成组等不同的装配层级,同时还需要对模块安装的位置、顺序等开展研究,从而提高装配的效率和合理性。 4.4 空间在轨建造技术未来超大尺度空间折展机构收拢后的尺度将远大于运载火箭的有效包络空间。现阶段的地面制造、在轨展开,未来中短期的分批发射、在轨装配的模式难以满足长期发展的需求,在轨建造可以突破运载火箭包络空间的限制,有效降低发射成本,实现超大尺度空间折展机构的在轨设计,是未来大型航天器设计的一项颠覆性技术。目前,国际上已初步实现了在轨零部件的建造,但作为新兴技术尚处于起步阶段,应当围绕“造得出、造得精、用得久”三个方面开展更深入的预先研究。 1)空间3D打印技术。空间环境具有大温差、高真空、微重力等极端复杂、恶劣的特点,研究适应空间环境的空间3D打印技术,将新材料、功能材料与增材制造进行交叉融合,并将生命科学、生物技术融入到制造中,使制造富有“生命力”,实现自感知、自决策和自执行,在空间中打印出结构复杂的核心零部件以及全尺寸的大型折展结构。 2)高精度建造技术。模块化空间折展机构是高精密航天装备,其本身的结构精度对空间任务的执行有着重要的影响。发展精准成形制造技术,在打印机制备、打印速度、吐丝参数等方面开展研究,制造出结构复杂、高性能、高精度的零部件,实现形状、性能精准可控,降低零部件质量,提高材料利用率、缩短制造流程。 3)长寿命及绿色制造技术。模块化空间折展机构服役期通常为3~5年,有的则长达10年之久,因此对结构的寿命提出了更高的要求。研究保质设计及制造方法,保证建造出的结构在全寿命周期内具有高品质、高效能,使用寿命精准可预测。同时,发展空间绿色制造技术,实现零部件制造过程、使用过程与回收再利用的绿色化,减少太空垃圾。 5 结论本文对模块化空间折展机构领域的研究进行了概述,重点对伸展臂、太阳翼和空间可展开天线等三类折展机构中具有模块化特征的构型进行了介绍,分析了模块化空间折展机构研究及应用现状,并从4个方面对该领域未来的发展进行了展望。得到如下主要结论: 1)目前,模块化空间折展机构以刚性、半刚性桁架式结构为主,由于其具有技术成熟、刚性好等优点,在短期内仍将是折展机构研究和应用的重点。柔性材料收纳率高、质量轻,具有良好的发展潜力,在模块化折展机构应用中的比例将逐渐增加,未来有望取得突破性进展。 2)由模块化空间折展机构国内研究进展可见,中国在该领域的研究和应用已经取得了长足的进步和发展,多款大尺度模块化折展机构已实现在轨应用。但机构构型的原始创新性不足,还需要在基础性、前沿性、交叉性等方面开展深入的研究,提高中国空间技术的原始创新能力。 3)未来5~10年,中国将陆续实施火星深空探测、新型载人飞船、长期在轨空间站、巡天望远镜、太阳极轨望远镜等一批国家重大航天工程,大型模块化空间折展机构将面临前所未有的机遇与挑战,加强基础研究,打牢工程试验根基,将是提高我国空间科学技术核心竞争力的根本。 猜你喜欢 铰链模块化天线 新型变厚度柔性铰链的设计与研究机械科学与技术(2022年8期)2022-08-30重卡内饰模块化技术汽车实用技术(2022年11期)2022-06-20具有共形能力的阻抗可调天线成都信息工程大学学报(2022年2期)2022-06-14用模块化思维打造组织商业评论(2022年4期)2022-05-05基于实际制造水平的车门分体式型钢铰链可行性研究时代汽车(2021年11期)2021-08-04型钢铰链应用技术研究汽车零部件(2021年1期)2021-02-02JGJ/T 435—2018施工现场模块化设施技术标准中国建筑金属结构(2019年4期)2019-05-15应用于5G移动终端的宽带八天线系统移动通信(2019年2期)2019-03-27天线音响发明与创新·大科技(2018年2期)2018-03-17模块化微流控系统与应用分析化学(2018年12期)2018-01-22
|













 中国空间科学技术2021年4期
中国空间科学技术2021年4期【本文地址】