| ABB工业机器人程序编写与实战 | 您所在的位置:网站首页 › 工业机器人编程软件教学 › ABB工业机器人程序编写与实战 |
ABB工业机器人程序编写与实战
|
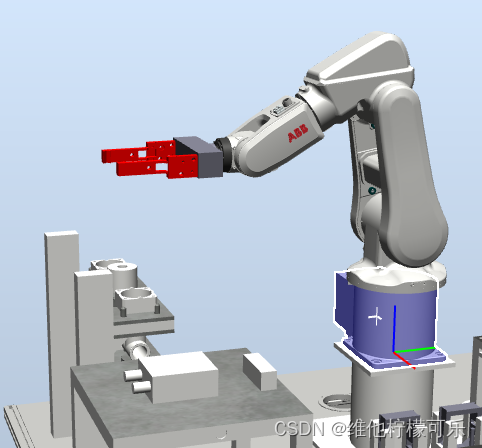
任务:实现物件从一个位置移动到另一个位置
1 补充的知识点:
1.1ABB工业机器人编程语言PAPID
任务 程序模块、系统模块 例行程序 PP指针 机器人运动指令: MoveJ ToPoint, Speed, Zone,Tool \[Wobj]; MoveL ToPoint, Speed, Zone,Tool \[Wobj]; ToPoint:目标点,默认为 *。 ( robtarget ) Speed: 运行速度数据。 ( speeddata )Zone: 运行转角数据(转弯半径)。 ( zonedata ) Tool: 工具中心点 ( TCP )。 ( tooldata ) [\Wobj]:工件座标系。 ( wobjdata ) MoveJ(曲线运动)机器人以最快捷的方式运动至目标点,机器人运动轨迹不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。MoveL(直线运动)机器人以线性移动方式运动至目标点,当前点与目标点两点决定一条直线,机器人运动状态可控,运动路径保持唯一,可能出现死点,常用于机器人在工作状态移动。固定坐标系,很完美的位置:
仿真软件显示画面: 程序使用C#写的,代码也是很简单。像C语言一样,C#也有主函数部分。
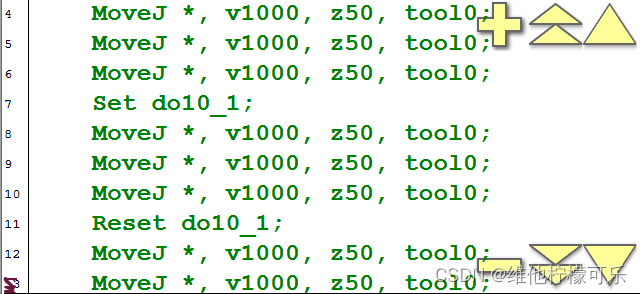
程序解读: 第一个MoveJ:初始位置 第二个MoveJ:取物件正上方 第三个Movej:取物件位置 Set:夹住 第四个Movej:取物件正上方 第五个Movej:放物件正上方 第六个Movej:放物件位置 Reset:放开 第七个Movej:放物件正上方 第八个Movej:初始位置 问题:为什么单步运行夹货物能改放到正确的位置,而连续运行下,夹货物会出现位置没放到对应位置的问题? MoveJ的转角半径要越大越好,但不能超过下端路径的一半。需要将z50改成Fine模式,调整转角半径。因为在取物件或者放物件的时候,要将区域位置改成Fine模式。 科普: 机器人运动指令: MoveJ ToPoint, Speed, Zone,Tool \[Wobj]; MoveL ToPoint, Speed, Zone,Tool \[Wobj]; 解释: ToPoint:目标点,默认为 *。 ( robtarget ) Speed: 运行速度数据。 ( speeddata ) Zone: 运行转角数据。 ( zonedata ) Tool: 工具中心点 ( TCP )。 ( tooldata ) [\Wobj]:工件座标系。 ( wobjdata ) 应用: MoveJ(曲线运动)机器人以最快捷的方式运动至目标点,机器人运动轨迹不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。MoveL(直线运动)机器人以线性移动方式运动至目标点,当前点与目标点两点决定一条直线,机器人运动状态可控,运动路径保持唯一,可能出现死点,常用于机器人在工作状态移动。例子: MoveJ: MoveJ p20, v1000, z50,tool0; MoveJ :曲线运动 MoveL: MoveL p20, v1000, z50,tool0; p20目标点v1000速度1000mm/s(TCP速度?)z50转弯半径50mm作用:有效提高运行效率;设置原则: 1、越大越好; 2、不超过下段路径长度的一半 全Fine和区域位置用Fine的用时对比: 全Fine:3.5s
区域位置用Fine:3s
MoveJ ToPoint, Speed, Zone,Tool \[Wobj]; ToPoint:更改名字,对程序更好理解(初始位置命名为pHome) 对以上各个指令ToPoint的更改:
2.2 路径规划以及MoveL,MoveJ指令使用 2.2.1 指令使用 MoveL:直线运动(转弯半径) MoveJ:曲线运动(转弯半径) 例子:工件的上下摆放必须走直线(MoveL),防止出现问题 2.2.2TCP的跟踪:
|





【本文地址】