| 拟牛顿算法,SR1,DFP,BFGS步骤 | 您所在的位置:网站首页 › 修正牛顿法和拟牛顿法 › 拟牛顿算法,SR1,DFP,BFGS步骤 |
拟牛顿算法,SR1,DFP,BFGS步骤
|
拟牛顿算法
在牛顿算法中我们要面对逆向的Hessian以及二阶的偏导。导致我们的计算量很大,为了提高效率,如果无法使用Hessian矩阵H(x),或者如果计算逆矩阵的计算量太大(复杂度为O(N ^ 3),则拟牛顿法可以 仅可用于基于一阶导数,f( x)(具有复杂度 O(N ^ 2))的梯度g来建立一个近似Hessian的矩阵或其逆的近似矩阵 ,类似于先前考虑的Broyden方法。我们可以使用拟牛顿算法。 下面我们考虑最小化函数f(x)。 围绕点X_n+1进行泰勒展开得到如下方程:  计算: 计算:   是我们的步长。更新公式来满足拟牛顿算法: 是我们的步长。更新公式来满足拟牛顿算法:  如果达到终止条件,则结束,没达到条件则返回第二步N=N+1。 如果达到终止条件,则结束,没达到条件则返回第二步N=N+1。
在我们的这个求解局部最小值中, B_n也就是我们的近似矩阵,要是一个正定举证。(正定矩阵的定义看我的另一篇文章) SR1(Symmetric Rank 1)SR1 是拟牛顿算法中的一种,这里B_n的更新需要添加一个附加项。 但是SR1 算法有个问题就是需要Bn的逆向保持正定。 在整个迭代过程中可能很难维持这一要求。 在以下DFP和BFGS方法中可以避免此问题。 BFGS(Broyden-Fletcher-Goldfarb-Shanno)在这个算法中需要添加两个额外附加项:
像BFGS和DFP一样,它可能会出现舍入错误和行搜索不准确的情况。 BFGS和SR1更新之间的显着区别是,如果Bk为正定且skyk> 0,则BFGS保证产生正定Bk + 1,而SR1不具有此属性。SR1公式在许多情况下都可以生成更准确的Hessian近似值。 BFGS优于DFP的原因在于,BFGS有自校正的性质(self-correcting property)。通俗来说,如果某一步BFGS对Hessian阵的估计偏了,导致优化变慢,那么BFGS会在较少的数轮迭代内(取决于线搜索的质量),校正估计的Hessian阵。 |
 下面对X求导我们可以得到:
下面对X求导我们可以得到:  Evaluating at x=x_n,并且设g(x_n) = g_n那么上面的式子就可以变为:
Evaluating at x=x_n,并且设g(x_n) = g_n那么上面的式子就可以变为:  其中矩阵B _n 是Hessian矩阵H_n 的正割近似,最后的等式称为割线方程。 为了方便起见,我们进一步定义:
其中矩阵B _n 是Hessian矩阵H_n 的正割近似,最后的等式称为割线方程。 为了方便起见,我们进一步定义:  那么上面的公式可以变为:
那么上面的公式可以变为:  那么我们有了Hessian的近似矩阵,这样我们就可以达成了拟牛顿算法 的条件。 拟牛顿步骤:
那么我们有了Hessian的近似矩阵,这样我们就可以达成了拟牛顿算法 的条件。 拟牛顿步骤: 在这里u是一个向量。uut 是第一级的矩阵。以及加上我们的割线条件,就可以得到:
在这里u是一个向量。uut 是第一级的矩阵。以及加上我们的割线条件,就可以得到:  该方程式表示u与w=y_n - B_n s_n的方向相同,因此可以写成 u = cw 。 换回来我们得到:
该方程式表示u与w=y_n - B_n s_n的方向相同,因此可以写成 u = cw 。 换回来我们得到:  然后我们求的c等于:
然后我们求的c等于:
 那么Bn就会变成:
那么Bn就会变成:  接下来反转B_n+1我们可以得到:
接下来反转B_n+1我们可以得到: 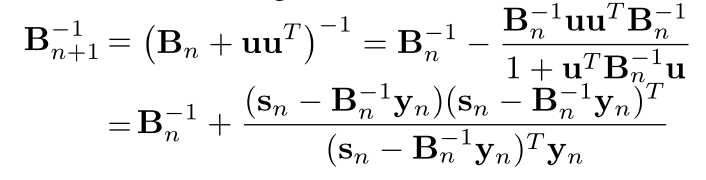 要想得到上面的结果,我们还可以使用对偶分割条件的方法:
要想得到上面的结果,我们还可以使用对偶分割条件的方法: 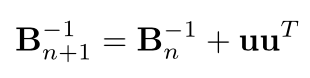
 更具割线定理,我们可以得到:
更具割线定理,我们可以得到:  然后将简化拓展:
然后将简化拓展: 






【本文地址】