| STM32F429与陶晶驰串口屏数据传输(2) | 您所在的位置:网站首页 › 串口数据显示软件怎么办 › STM32F429与陶晶驰串口屏数据传输(2) |
STM32F429与陶晶驰串口屏数据传输(2)
|
串口屏发送数据单片机
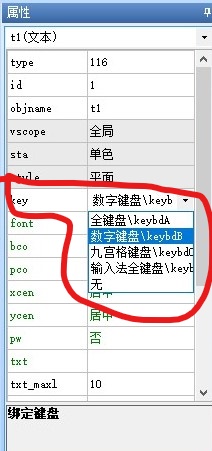
波特率要改为9600 数据的传输并非二进制数,而是 ASCII 值 stm32f429单片机:UART-串口接收1. 串口接收中断程序的配置(HAL库) (1)首先要去配置串口相关的参数(确定USARTx口、配置波特率、字节长度······),并且要使能串口(调用函数HAL_UART_lnit();) 例如: void uart1_init() { usart1_handler.Instance=USART1; //USART1 usart1_handler.Init.BaudRate=115200; //波特率 usart1_handler.Init.WordLength=UART_WORDLENGTH_8B; //字长为8位数据格式 usart1_handler.Init.StopBits=UART_STOPBITS_1; //一个停止位 usart1_handler.Init.Parity=UART_PARITY_NONE; //无奇偶校验位 usart1_handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //无硬件流控 usart1_handler.Init.Mode=UART_MODE_TX_RX; //收发模式 HAL_UART_Init(&usart1_handler); //HAL_UART_Init()会使能UART1 }(2)在HAL_UART_Msplnit 中调用 HAL_GPIO_lnit()来进行相关io口的复用配置,同时不要忘记使能USARTx通道,并且配置中断优先级。 串口接收中中断优先级函数配置: HAL_NVIC_SetPriority(USART1_IRQn,3,3); //抢占优先级3,子优先级3 以及串口USARTx通道的使能函数:HAL_NVIC_EnableIRQ(USART1_IRQn); //使能USART1中断通道 串口设置的一般步骤: 串口时钟使能,GPIO口使能设置引脚复用串口参数的初始化(这里将它分离出来放在了函数 void uart1_init() 里,包括了串口使能)GPIO口的初始化设置:要设置模式为复用功能初始化NVIC(优先级),如果使用中断就要使能串口中断 例如: void HAL_UART_MspInit(UART_HandleTypeDef *huart) { GPIO_InitTypeDef GPIO_Initure; if(huart->Instance==USART1) //如果是串口1,进行串口1 MSP初始化 { __HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟 __HAL_RCC_USART1_CLK_ENABLE(); //使能USART1时钟 GPIO_Initure.Pin=GPIO_PIN_9; //PA9 GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出 GPIO_Initure.Pull=GPIO_PULLUP; //上拉 GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速 GPIO_Initure.Alternate=GPIO_AF7_USART1; //复用为USART1 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA9 GPIO_Initure.Pin=GPIO_PIN_10; //PA10 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA10 HAL_NVIC_EnableIRQ(USART1_IRQn); //使能USART1中断通道 HAL_NVIC_SetPriority(USART1_IRQn,3,3); //抢占优先级3,子优先级3 } }(3)编写中断服务函数 void USART1_IRQHandler(void) { HAL_UART_IRQHandler(&usart1_handler); //开启串口USARTx的中断服务 while (HAL_UART_GetState(&usart1_handler) != HAL_UART_STATE_READY); //等待就绪 while(HAL_UART_Receive_IT(&usart1_handler, (u8 *)rdata, 1) != HAL_OK); }(4)可以调用串口接收中断函数:HAL_UART_Receive_IT(&usart1_handler, (u8 *)rdata, 1); rdata:指的是一个存放接收大的数据的数据的数组,可以声明为:u8 rdata[1]; 如果要进行数据的运算或处理,不要忘记是ASCII 值,要做 x=rdata[0]-‘0’; 这一步处理才能进行正确运算; 1:是指传输数据的大小,此处指的是数据在一位一位的传输; 使用串口接收中断函数,在整个数据被一位一位接收直到结束后会开启中断,停止继续传输相同的内容。 串口屏方面的设计:我这里使用了数字键盘来发送数据: 具体我截取了串口HMI指令集上的如图所示: 我的设计如图所示: 注意:如果在stm32中遇到代码中中断接受函数是如下图我标注的,接收中断收到的数据末尾就需要以0x0d 0x0a结尾,则需要添加 printh 0D 0A 来发送两个十六进制数。这段代码在f429中被注释了所以串口屏中不需要添加 printh 0D 0A 这个了
以下是我所使用的代码,实测可用,要注意的是要将串口通信实验中的 uart.c 源文件删去以免产生影响,所以无法使用显示屏 所以使用 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) 这个回馈函数将数据在传输到电脑串口用原子的 XCOM V2.0 软件来读取值。 USART2接收串口屏数据波特率需要9600为了统一,在USART1 和 XCOM V2.0 中的波特率也改为 9600需要看一下stm32f429手册和引脚分布 usart1 : PA9 — PA10 usart2 : PA2 — PA3 #include "sys.h" #include "delay.h" u8 rdata[1]; UART_HandleTypeDef usart1_handler; //UART句柄 void uart_init() { usart1_handler.Instance=USART1; //USART1 usart1_handler.Init.BaudRate=9600; //波特率 usart1_handler.Init.WordLength=UART_WORDLENGTH_8B; //字长为8位数据格式 usart1_handler.Init.StopBits=UART_STOPBITS_1; //一个停止位 usart1_handler.Init.Parity=UART_PARITY_NONE; //无奇偶校验位 usart1_handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //无硬件流控 usart1_handler.Init.Mode=UART_MODE_TX_RX; //收发模式 HAL_UART_Init(&usart1_handler); //HAL_UART_Init()会使能UART1 usart2_handler.Instance=USART2; //USART2 usart2_handler.Init.BaudRate=9600; //波特率 usart2_handler.Init.WordLength=UART_WORDLENGTH_8B; //字长为8位数据格式 usart2_handler.Init.StopBits=UART_STOPBITS_1; //一个停止位 usart2_handler.Init.Parity=UART_PARITY_NONE; //无奇偶校验位 usart2_handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //无硬件流控 usart2_handler.Init.Mode=UART_MODE_TX_RX; //收发模式 HAL_UART_Init(&usart2_handler); //HAL_UART_Init()会使能UART2 } void HAL_UART_MspInit(UART_HandleTypeDef *huart) { GPIO_InitTypeDef GPIO_Initure; if(huart->Instance==USART1)//如果是串口1,进行串口1 MSP初始化 { __HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟 __HAL_RCC_USART1_CLK_ENABLE(); //使能USART1时钟 GPIO_Initure.Pin=GPIO_PIN_9; //PA9 GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出 GPIO_Initure.Pull=GPIO_PULLUP; //上拉 GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速 GPIO_Initure.Alternate=GPIO_AF7_USART1; //复用为USART1 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA9 GPIO_Initure.Pin=GPIO_PIN_10; //PA10 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA10 HAL_NVIC_EnableIRQ(USART1_IRQn); //使能USART1中断通道 HAL_NVIC_SetPriority(USART1_IRQn,3,3); //抢占优先级3,子优先级3 } if(huart->Instance==USART2)//如果是串口1,进行串口1 MSP初始化 { __HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟 __HAL_RCC_USART2_CLK_ENABLE(); //使能USART2时钟 GPIO_Initure.Pin=GPIO_PIN_2; //PA2 GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出 GPIO_Initure.Pull=GPIO_PULLUP; //上拉 GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速 GPIO_Initure.Alternate=GPIO_AF7_USART2; //复用为USART2 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA2 GPIO_Initure.Pin=GPIO_PIN_3; //PA3 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA3 HAL_NVIC_EnableIRQ(USART2_IRQn); //使能USART2中断通道 HAL_NVIC_SetPriority(USART2_IRQn,3,3); //抢占优先级3,子优先级3 } } void USART1_IRQHandler(void) { HAL_UART_IRQHandler(&usart1_handler); while (HAL_UART_GetState(&usart1_handler) != HAL_UART_STATE_READY);//等待就绪 while(HAL_UART_Receive_IT(&usart1_handler, (u8 *)rdata, 1) != HAL_OK); } void USART2_IRQHandler(void) { HAL_UART_IRQHandler(&usart2_handler); while (HAL_UART_GetState(&usart2_handler) != HAL_UART_STATE_READY);//等待就绪 while(HAL_UART_Receive_IT(&usart2_handler, (u8 *)rdata, 1) != HAL_OK); } void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { u8 rec; if(huart->Instance==USART2)//如果是串口12 { rec=*(--(huart->pRxBuffPtr)); HAL_UART_Transmit(&usart1_handler,&rec,1,1000); } } int main(void) { HAL_Init(); //初始化HAL库 Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz delay_init(180); uart_init();//初始化串口参数 HAL_UART_Receive_IT(&usart2_handler,rdata, 1);//该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 while(1); } |



【本文地址】