| [无人驾驶]三维坐标系转换/无人车外参标定 | 您所在的位置:网站首页 › 三维坐标系转换发那科 › [无人驾驶]三维坐标系转换/无人车外参标定 |
[无人驾驶]三维坐标系转换/无人车外参标定
|
1、三维坐标系转换
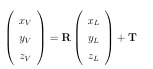
在无人车的外参标定中,各传感器获取的数据在自己的坐标系中,一般要转化到车辆坐标系中,车辆坐标系一般选择惯导坐标系。本文以顶装的激光雷达坐标系与车辆坐标系为例,具体讲述三维坐标转换,坐标示例如下图。图中
O
V
−
X
V
Y
V
Z
V
O_{V}-X_{V}Y_{V}Z_{V}
OV−XVYVZV为车辆坐标系,
O
L
−
X
L
Y
L
Z
L
O_{L}-X_{L}Y_{L}Z_{L}
OL−XLYLZL为雷达坐标系,每个轴规定的旋转正方向如图。 (1)原理 对于每个激光雷达坐标系中的点
P
′
(
x
L
,
y
L
,
z
L
)
P^{'}(x_{L},y_{L},z_{L})
P′(xL,yL,zL),假设其在车辆坐标系中对应的点为
P
(
x
V
,
y
V
,
z
V
)
P(x_{V},y_{V},z_{V})
P(xV,yV,zV),则存在旋转矩阵
R
\textbf{R}
R和平移矩阵
T
\textbf{T}
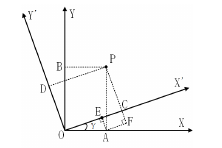
T,将该点从雷达坐标系转换到车辆坐标系。 (2)旋转矩阵 R \textbf{R} R 定义顺规Z-Y-X(也可以是别的顺序),即先按Z轴旋转 γ \gamma γ,再按Y轴旋转 β \beta β,最后按X轴旋转 α \alpha α,组合三次旋转矩阵求得最终的旋转矩阵为 R = R Z R Y R X \textbf{R}=\textbf{R}_{Z}\textbf{R}_{Y}\textbf{R}_{X} R=RZRYRX。
以按Z轴旋转为例,此时z值保持不变,如上图。对于
O
−
X
Y
O-XY
O−XY中的点
P
(
x
,
y
)
P(x,y)
P(x,y)转换到
O
−
X
′
Y
′
O-X^{'}Y^{'}
O−X′Y′中点
P
′
(
x
′
,
y
′
)
P^{'}(x^{'},y^{'})
P′(x′,y′),有
x
′
=
O
E
+
C
E
x^{'}=OE+CE
x′=OE+CE,
y
′
=
P
F
−
C
F
y^{'}=PF-CF
y′=PF−CF,
z
′
=
z
z^{'}=z
z′=z,可知 (3)平移矩阵
T
\textbf{T}
T |

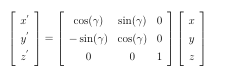 即
R
Z
\textbf{R}_{Z}
RZ为:
即
R
Z
\textbf{R}_{Z}
RZ为: 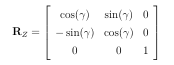 同理求得
R
Y
\textbf{R}_{Y}
RY、
R
X
\textbf{R}_{X}
RX:
同理求得
R
Y
\textbf{R}_{Y}
RY、
R
X
\textbf{R}_{X}
RX:  进一步可推导旋转矩阵
R
\textbf{R}
R(这里可以手算一下):
进一步可推导旋转矩阵
R
\textbf{R}
R(这里可以手算一下): 
 综上,外参标定即是求
Δ
x
\Delta x
Δx、
Δ
y
\Delta y
Δy、
Δ
z
\Delta z
Δz三个平移量以及
α
\alpha
α、
β
\beta
β、
γ
\gamma
γ三个角度,进而求得外参矩阵
R
\textbf{R}
R、
T
\textbf{T}
T。
综上,外参标定即是求
Δ
x
\Delta x
Δx、
Δ
y
\Delta y
Δy、
Δ
z
\Delta z
Δz三个平移量以及
α
\alpha
α、
β
\beta
β、
γ
\gamma
γ三个角度,进而求得外参矩阵
R
\textbf{R}
R、
T
\textbf{T}
T。【本文地址】