| PI电流调节器介绍 | 您所在的位置:网站首页 › pi调节器的计算公式 › PI电流调节器介绍 |
PI电流调节器介绍
|
导读:本期主要介绍PI电流调节器的种类和原理,下期将分别介绍线性PI、复矢量PI、离散域下设计的PI和基于MPC设计的PI电流调节器。 一、工作原理 1.1原理 当不完全了解一个系统和被控对象, 或不能通过有效的测量手段来获得系统参数时,最适合用 PID控制技术。 1.1.1 比例 (P) 控制 控制器的输出与输入误差信号成比例关系。偏差一旦产生,控制器立即就发生作用即调节控制输出,使被控量朝着减小偏差的方向变化。 Kp 越大,偏差减小越快。但易引起震荡,在延迟环节较大时,Kp 越小,引起震荡可能性越小,调节速度越慢。单纯的比例控制存在稳态误差不能消除。
2.1.2 积分 (I) 控制 控制器的输出与输入误差信号的积分成正比关系。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。 但积分 I 有 90 度的相位滞后,这会减小相位裕度,常见的结果是超调和震荡。 比例 + 积分 (PI) 控制器,可以使系统在进入稳态后无稳态误差。
性能影响: 积分控制可以增强系统抗高频干扰能力。故可相应增加开环增益,从而减少稳态误差。但纯积分环节会带来相角滞后,减少了系统相角裕度。 二、PI电流调节器 2.1输出关系
特点: 1、提高系统的型别,改善系统的稳态误差;2、增加了系统的抗高频干扰的能力;3、增加了相位滞后;4、降低了系统的频宽,调节时间增大; 2.2 PI调试的一般原则
PI 调节器的输出直接控制执行机构。这种算法的优点是计算精度比较高,缺点是每次都要对 e(k)进行累加,很容易出现积分饱和的情况,由于位置式 PI 调节器直接控制的是执行机构,积分一旦饱和就会引起执行机构位置的大幅度变化,造成控制对象的不稳定。 3.2增量式PI电流调节器
增量式 PI 算法与位置式 PI 算法并没有本质的区别,只是增量式 PI 算法控制的是执行机构的增量 △u(k),这种算法的优点在于:由于输出的是增量,因此计算错误时的产生的影响较小,控制量的确定仅与最近几次偏差采样值有关,运算量相对较小。这种算法的缺点在于:每次计算 △u(k) 再与前次的计算结果 u(k -1) 相加得到本次的控制输出。 这就使得 △u(k) 的截断误差被逐次的累加起来,输出的误差加大。当采用增量式算法时必须尽量减小定点运算带来的截断误差,否则,每一次运算的截断误差将会逐次累积,使系统的控制精度变差,造成系统的静态误差。 四、仿真建立
图1 PI电流调节器系统仿真 图1是位置式PI电流调节器,由比例项和积分项两部分组成。为了防止积分饱和的出现,给PI加了一个限幅,抑制积分饱和的出现。
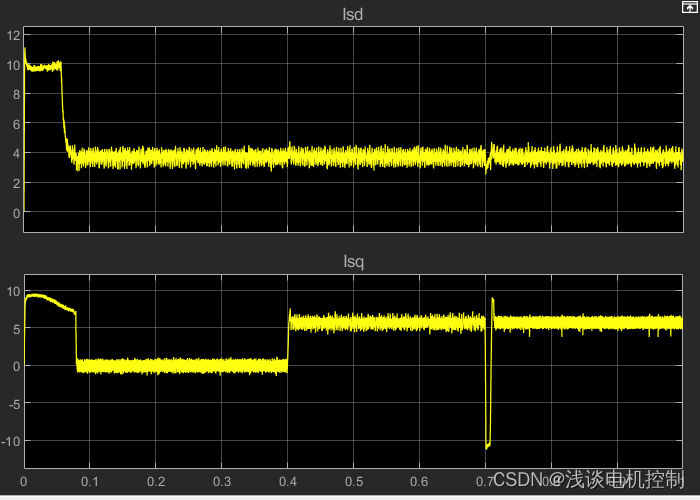
图2 PI电流调节器的输出 由图2可知,dq轴输出的电流和理论一致,说明搭建的PI电流调节器可以有效调节电流。 五、总结 PI电流调节器是矢量控制中的重要模块之一。矢量控制的控制性能依赖内环PI电流调节器的参数整定,所以对PI电流调节器的设计至关重要。 |







【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |