|
STM32F103C8T6 MPU6050 原始数据通过串口读取(CubeMx生成 HAL库)
文章目录
STM32F103C8T6 MPU6050 原始数据通过串口读取(CubeMx生成 HAL库)
前言一、MPU6050简介二、CubeMx设置三、MPU6050驱动结果展示
前言
MPU6050作为一个六轴惯性测量单元,经常在各种设备中被使用,经过一段时间的调试,对其进行小总结,有错误还请各位大佬指出。
一、MPU6050简介
1.基础介绍 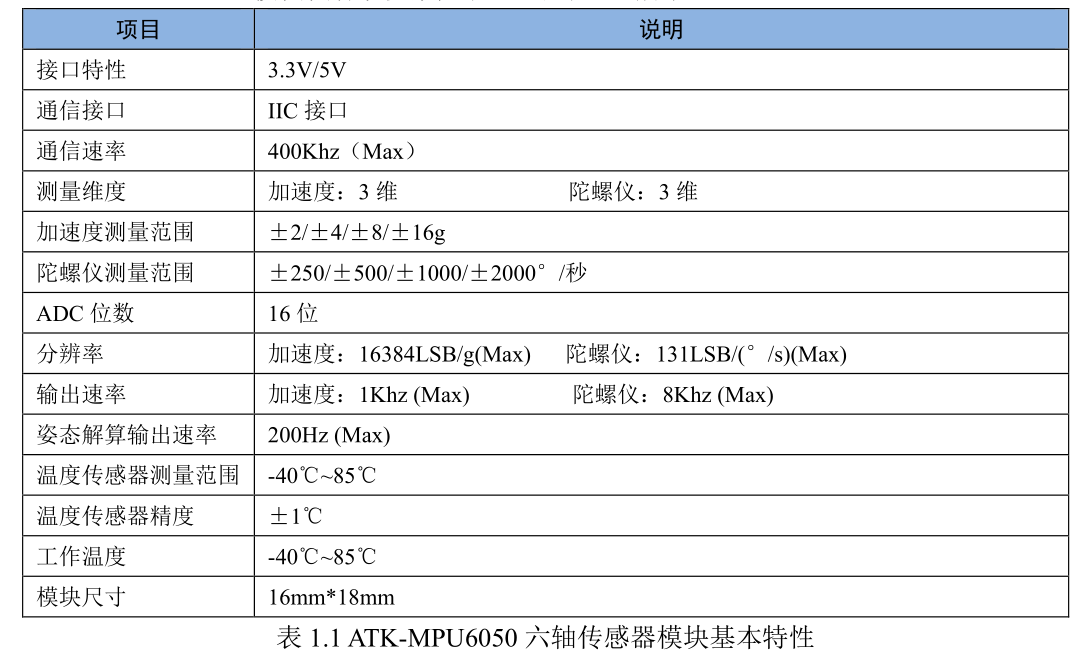
MPU6050采用I2C口与单片机进行通信,作为一款六轴运动处理组件,其整合了3轴陀螺仪和三轴加速度传感器,并且含有第二I2C接口用于连接外部磁力传感器。利用自带的数字运动处理(DMP: Digital Motion Processor)硬件加速引擎,通过主 IIC 接口,向应用端输出完整的 9 轴融合演算数据。有了 DMP,我们可以使用 InvenSense 公司提供的运动处理资料库,非常方便的实现姿态解算,降低了运动处理运算对操作系统的负荷,同时大大降低了开发难度。
MPU6050的内部框图入图所示:
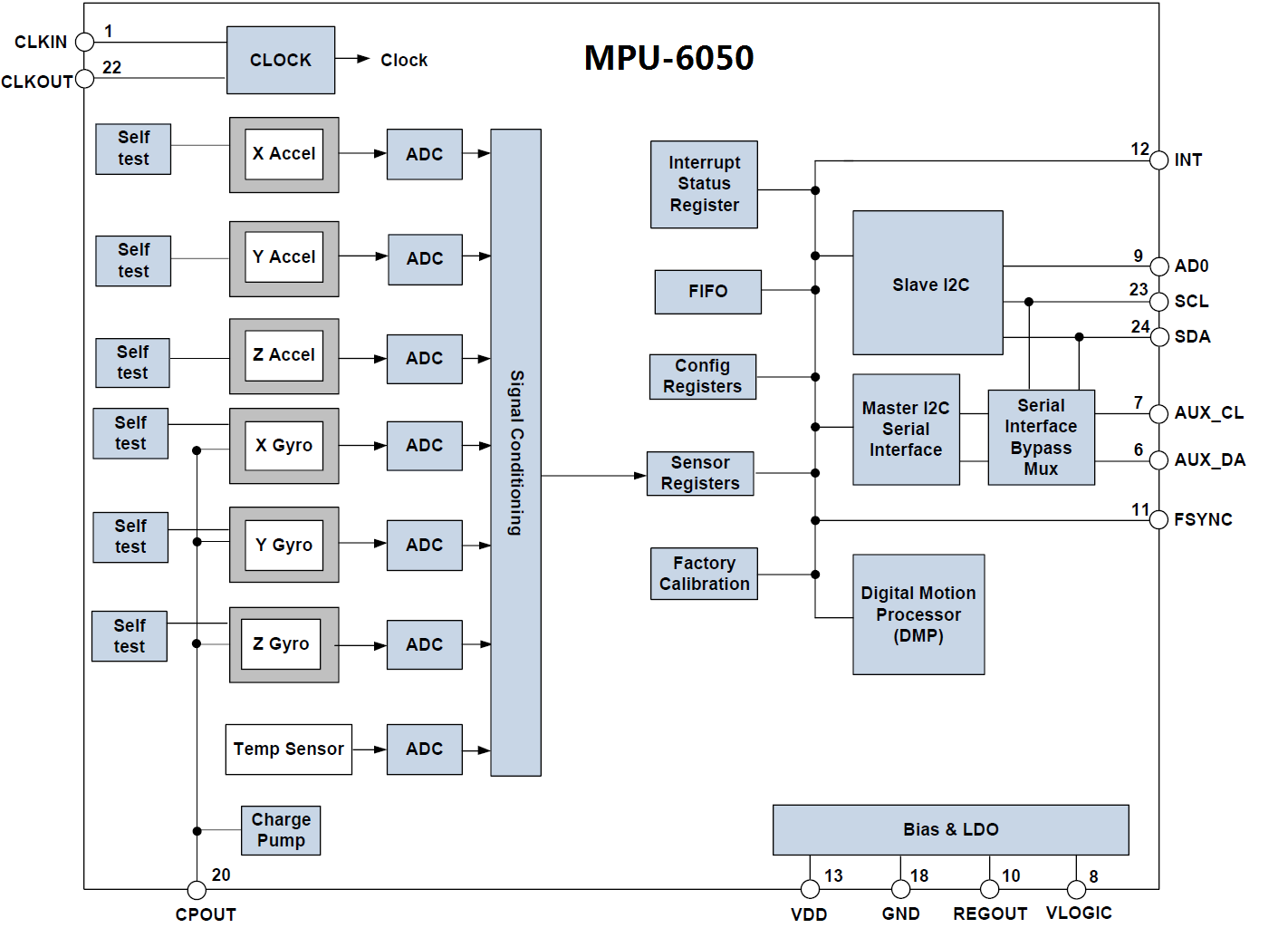
SCL和SDA是连接在MCU的I2C接口,MCU可以通过这个I2C接口来控制MPU6050,另外的I2C接口用于连接外部设备,若连接磁传感器,就可以组成九
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050
3)设置角速度传感器(陀螺仪)和加速度传感器的满量程范围 设置两个传感器的满量程范围(FSR),分别通过陀螺仪配置寄存器(0X1B)和加速度传感器配置寄存器(0X1C)设置。一般设置陀螺仪的满量程范围为±2000dps,加速度传感器的满量程范围为±2g
 
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr)
{
return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr
u8 data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
//设置MPU6050的采样率(假定Fs=1KHz)
//rate:4~1000(Hz)
uint8_t MPU_Set_Rate(uint16_t rate)
{
uint8_t data;
if(rate>1000)rate=1000;
if(rate
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU_Set_Rate(50); //设置采样率为50Hz
} else return 1;
return 0;
}
//设置MPU6050陀螺仪传感器满量程范围
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
//返回值:0,设置成功
// 其他,设置失败
uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr)
{
return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr
uint8_t data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
//设置MPU6050的采样率(假定Fs=1KHz)
//rate:4~1000(Hz)
//返回值:0,设置成功
// 其他,设置失败
uint8_t MPU_Set_Rate(uint16_t rate)
{
uint8_t data;
if(rate>1000)rate=1000;
if(rate
uint8_t buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((uint16_t)buf[0]
*ax=((uint16_t)buf[0]
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
for(i=0; i
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_Stop();
return 0;
}
//IIC连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取的长度
//buf:读取到的数据存储区
//返回值:0,正常
// 其他,错误代码
uint8_t MPU_Read_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr
if(len==1)*buf=MPU_IIC_Read_Byte(0);//读数据,发送nACK
else *buf=MPU_IIC_Read_Byte(1); //读数据,发送ACK
len--;
buf++;
}
MPU_IIC_Stop(); //产生一个停止条件
return 0;
}
//IIC写一个字节
//reg:寄存器地址
//data:数据
//返回值:0,正常
// 其他,错误代码
uint8_t MPU_Write_Byte(uint8_t reg,uint8_t data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}
//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
uint8_t MPU_Read_Byte(uint8_t reg)
{
uint8_t res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDRBRR = IIC_SDA_PIN /* SDA = 0 */
#define IIC_SDA_READ() ((GPIO_PORT_IIC->IDR & IIC_SDA_PIN) != 0) /* 读SDA口线状态 */
#endif
void IIC_GPIO_Init(void);
/*
*********************************************************************************************************
* 函 数 名: IIC_Delay
* 功能说明: IIC总线位延迟,最快400KHz
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
static void IIC_Delay(void)
{
uint8_t i;
/*
下面的时间是通过安富莱AX-Pro逻辑分析仪测试得到的。
CPU主频72MHz时,在内部Flash运行, MDK工程不优化
循环次数为10时,SCL频率 = 205KHz
循环次数为7时,SCL频率 = 347KHz, SCL高电平时间1.5us,SCL低电平时间2.87us
循环次数为5时,SCL频率 = 421KHz, SCL高电平时间1.25us,SCL低电平时间2.375us
IAR工程编译效率高,不能设置为7
*/
for (i = 0; i
/* 当SCL高电平时,SDA出现一个上跳沿表示IIC总线停止信号 */
IIC_SDA_0();
IIC_SCL_1();
IIC_Delay();
IIC_SDA_1();
}
/*
*********************************************************************************************************
* 函 数 名: IIC_SendByte
* 功能说明: CPU向IIC总线设备发送8bit数据
* 形 参:_ucByte : 等待发送的字节
* 返 回 值: 无
*********************************************************************************************************
*/
void IIC_Send_Byte(uint8_t _ucByte)
{
uint8_t i;
/* 先发送字节的高位bit7 */
for (i = 0; i
IIC_SDA_1();
}
else
{
IIC_SDA_0();
}
IIC_Delay();
IIC_SCL_1();
IIC_Delay();
IIC_SCL_0();
if (i == 7)
{
IIC_SDA_1(); // 释放总线
}
_ucByte
value
uint8_t re;
IIC_SDA_1(); /* CPU释放SDA总线 */
IIC_Delay();
IIC_SCL_1(); /* CPU驱动SCL = 1, 此时器件会返回ACK应答 */
IIC_Delay();
if (IIC_SDA_READ()) /* CPU读取SDA口线状态 */
{
re = 1;
}
else
{
re = 0;
}
IIC_SCL_0();
IIC_Delay();
return re;
}
/*
*********************************************************************************************************
* 函 数 名: IIC_Ack
* 功能说明: CPU产生一个ACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void IIC_Ack(void)
{
IIC_SDA_0(); /* CPU驱动SDA = 0 */
IIC_Delay();
IIC_SCL_1(); /* CPU产生1个时钟 */
IIC_Delay();
IIC_SCL_0();
IIC_Delay();
IIC_SDA_1(); /* CPU释放SDA总线 */
}
/*
*********************************************************************************************************
* 函 数 名: IIC_NAck
* 功能说明: CPU产生1个NACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void IIC_NAck(void)
{
IIC_SDA_1(); /* CPU驱动SDA = 1 */
IIC_Delay();
IIC_SCL_1(); /* CPU产生1个时钟 */
IIC_Delay();
IIC_SCL_0();
IIC_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: IIC_GPIO_Config
* 功能说明: 配置IIC总线的GPIO,采用模拟IO的方式实现
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void IIC_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_IIC_ENABLE; /* 打开GPIO时钟 */
GPIO_InitStructure.Pin = IIC_SCL_PIN | IIC_SDA_PIN;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD; /* 开漏输出 */
HAL_GPIO_Init(GPIO_PORT_IIC, &GPIO_InitStructure);
/* 给一个停止信号, 复位IIC总线上的所有设备到待机模式 */
IIC_Stop();
}
/*
*********************************************************************************************************
* 函 数 名: IIC_CheckDevice
* 功能说明: 检测IIC总线设备,CPU向发送设备地址,然后读取设备应答来判断该设备是否存在
* 形 参:_Address:设备的IIC总线地址
* 返 回 值: 返回值 0 表示正确, 返回1表示未探测到
*********************************************************************************************************
*/
uint8_t IIC_CheckDevice(uint8_t _Address)
{
uint8_t ucAck;
IIC_GPIO_Init(); /* 配置GPIO */
IIC_Start(); /* 发送启动信号 */
/* 发送设备地址+读写控制bit(0 = w, 1 = r) bit7 先传 */
IIC_Send_Byte(_Address|IIC_WR);
ucAck = IIC_Wait_Ack(); /* 检测设备的ACK应答 */
IIC_Stop(); /* 发送停止信号 */
return ucAck;
}
IIC.h
#ifndef _IIC_H
#define _IIC_H
#include
#define IIC_WR 0 /* 写控制bit */
#define IIC_RD 1 /* 读控制bit */
void IIC_Start(void);
void IIC_Stop(void);
void IIC_Send_Byte(uint8_t _ucByte);
uint8_t IIC_Read_Byte(uint8_t ack);
uint8_t IIC_Wait_Ack(void);
void IIC_Ack(void);
void IIC_NAck(void);
uint8_t IIC_CheckDevice(uint8_t _Address);
void IIC_GPIO_Init(void);
#endif
完成所有驱动文件的添加之后记得将User文件夹添加到c/c++路径中编译,编译成功后就可以开始编写主函数。
首先添加头文件  为了串口打印方便,加入printf函数 为了串口打印方便,加入printf函数 
int main(void)
{
/* USER CODE BEGIN 1 */
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
short temp; //温度
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
MPU_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(500);
MPU_Get_Accelerometer(&aacx,&aacy,&aacz);
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz);
temp=MPU_Get_Temperature();
printf("AAC_X:%5d AAC_Y:%5d AAC_Z:%5d\r\nGYRO_X:%5d GYRO_Y:%5d GYRO_Z:%5d\r\n",
aacx,aacy,aacz,gyrox,gyroy,gyroz);
}
/* USER CODE END 3 */
}
结果展示
STM32F103C8T6 MPU6050 原始数据读取(CubeMx生成 HAL库)
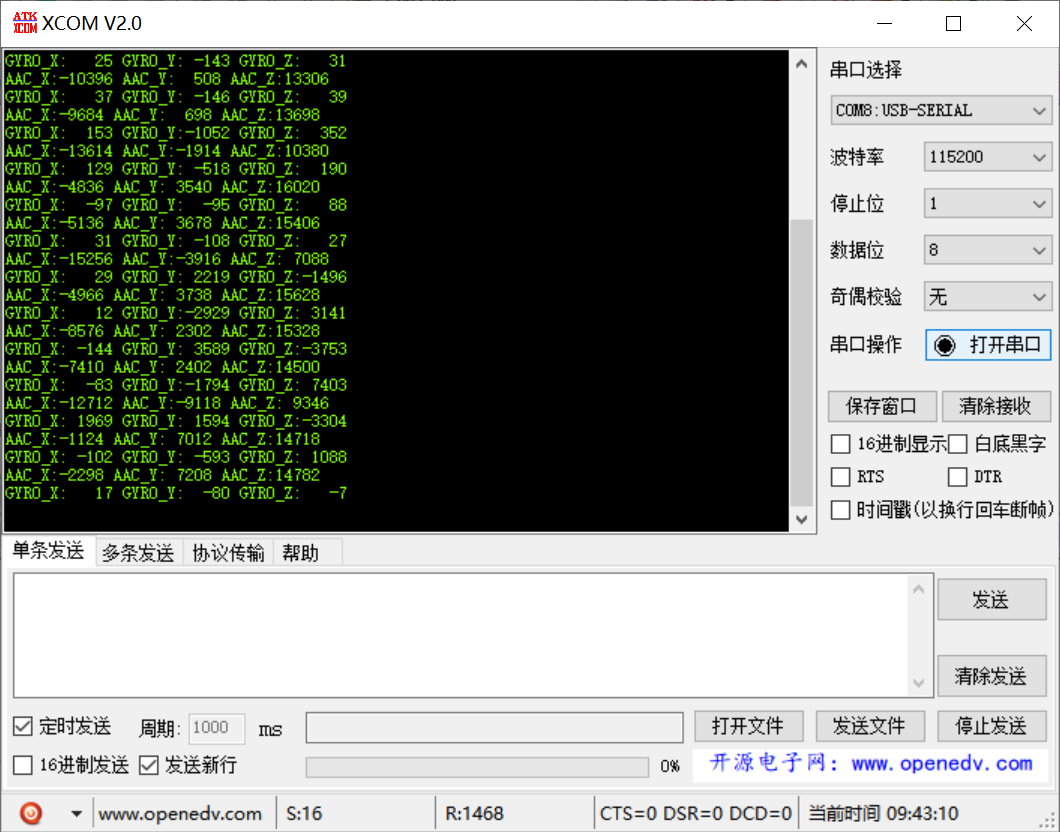
原始数据的读取对于MPU6050的使用而言只是第一步,要想取得俯仰角(pitch),横滚角(roll),航偏角(yaw)的数据,还需要使用官方给出的DMP库或者卡尔曼滤波。
|