| OpenSim仿真流程概述 | 您所在的位置:网站首页 › opensim软件能做什么 › OpenSim仿真流程概述 |
OpenSim仿真流程概述
|
OpenSim仿真流程open
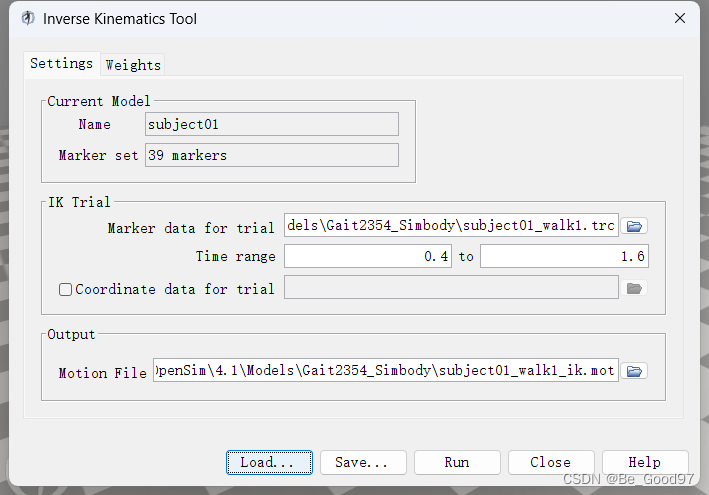
打开人体模型Gait2354_Simbody,进行行走运动仿真。 行走过程的逆运动学(IK)仿真。逆运动学不考虑产生动作的力和力矩的情况下对运动的研究,不需要知道物体的质量和惯性。 通过实验(通常使用VICON等一组红外摄像头设备)采集得到一系列人体运动的标记点的.trc轨迹文件。将其导入逆运动学之后,便可以在绘图工具Plot中得到这个运动过程的广义关节角度。这个步骤输出的运动文件.mot是后面的进行逆动力学、残差缩减等仿真需要的。 1.加载逆运动学的设置文件subject01_Setup_IK.xml
2.添加实验的运动轨迹,输出. mot的运动文件
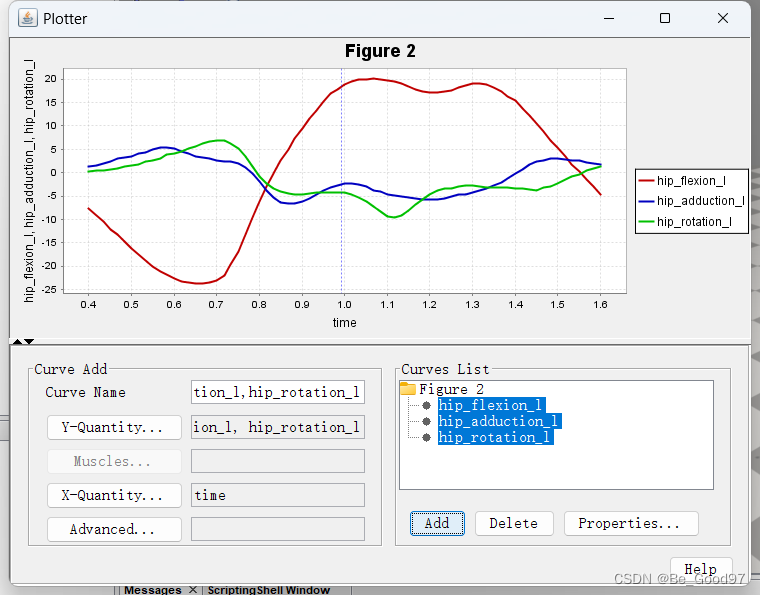
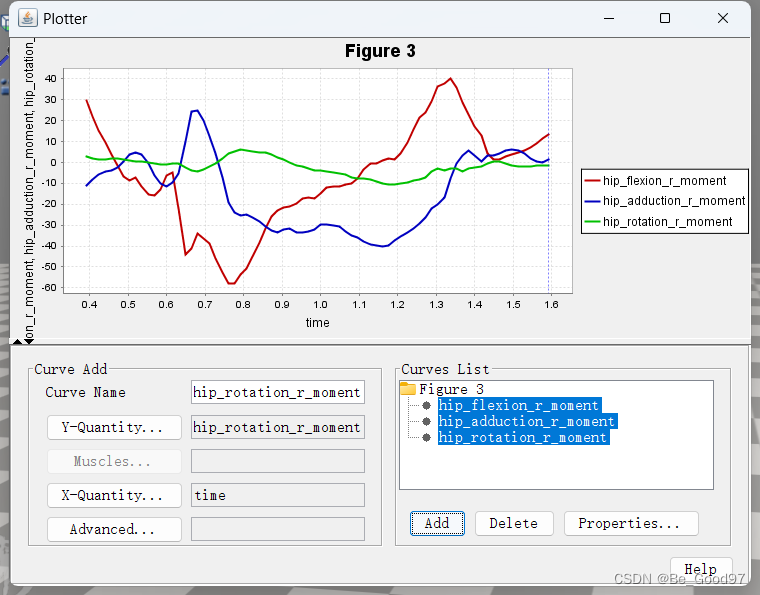
3.仿真完成,绘制行走运动的各个关节角度曲线
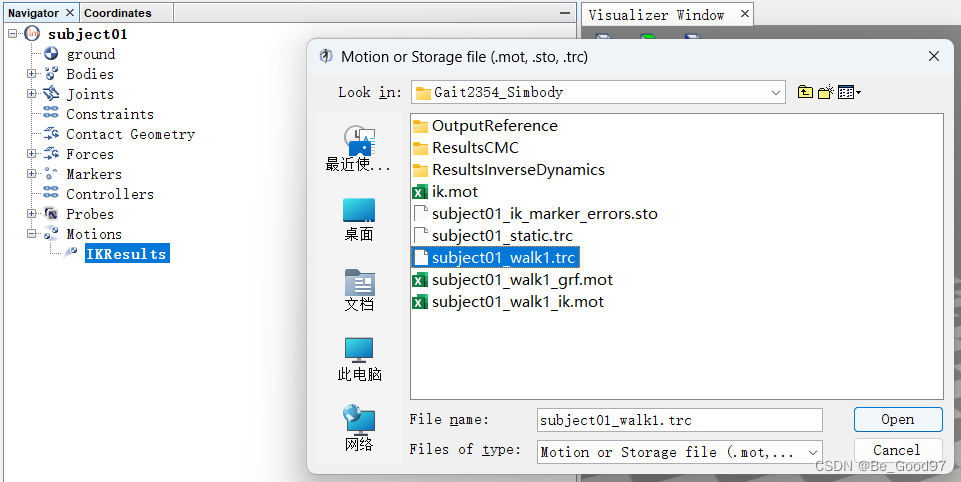
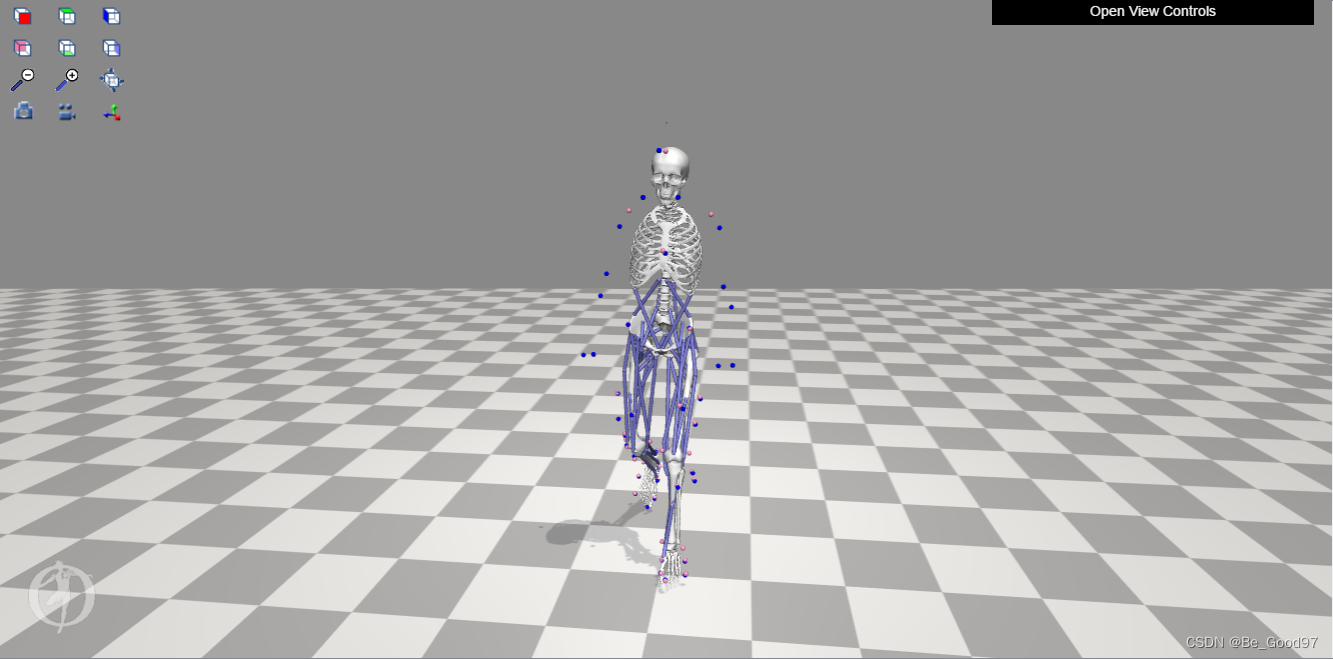
4. Associate Motion Data…→subject01_walk1.trc将输出结果与运动轨迹相关联,观察标记点与模型缩放后的差异,粉色标记点为模型自带,蓝色标记点为自己设置的。
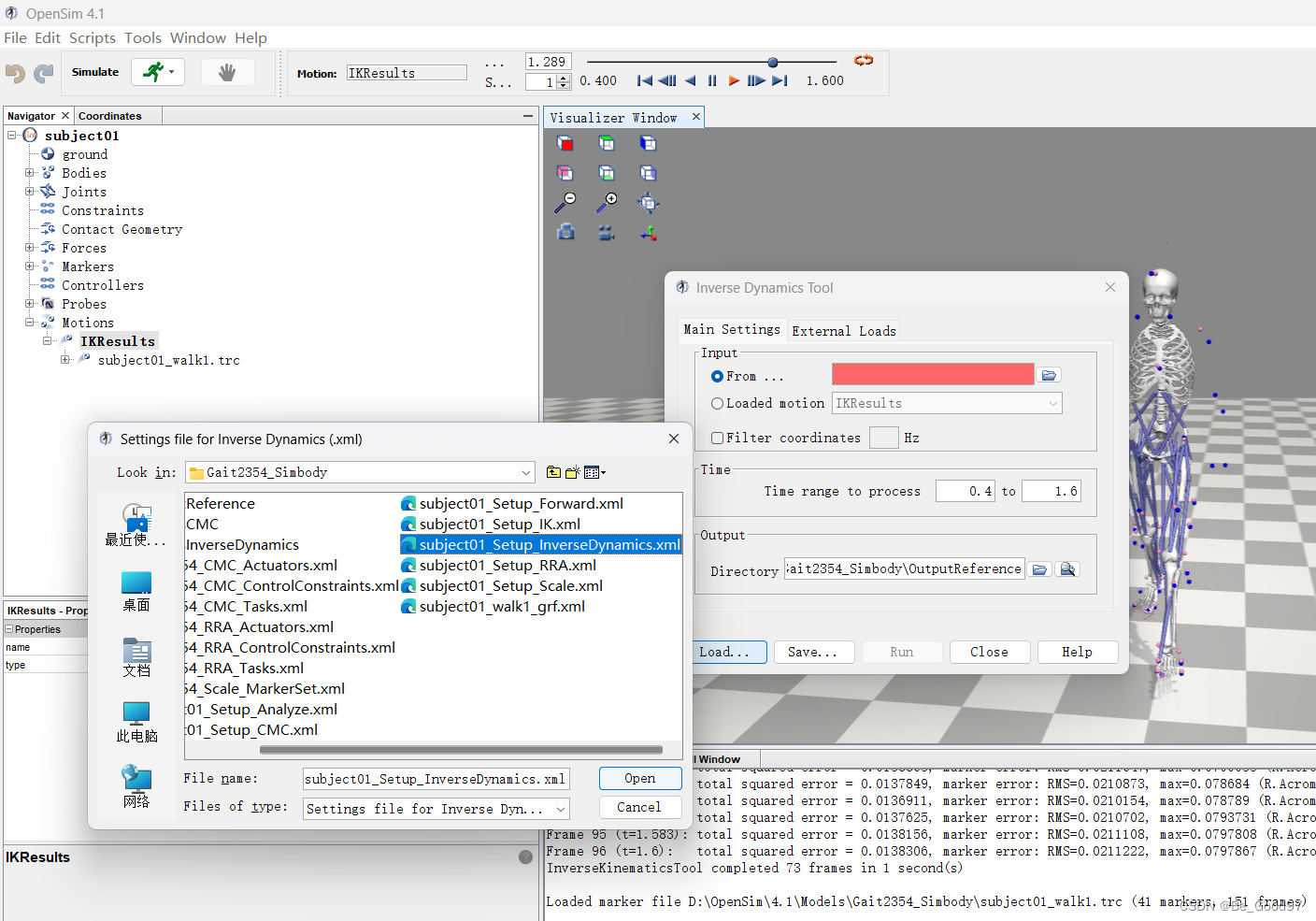
逆动力学一般用来得到运动过程中的每个关节力矩的数据。 逆动力学仿真需要逆运动学仿真得到的运动文件.mot和人体模型受到的外部作用力——地面反作用力。 1.加载逆动力学(ID)的设置文件subject01_Setup_InverseDynamics.xml
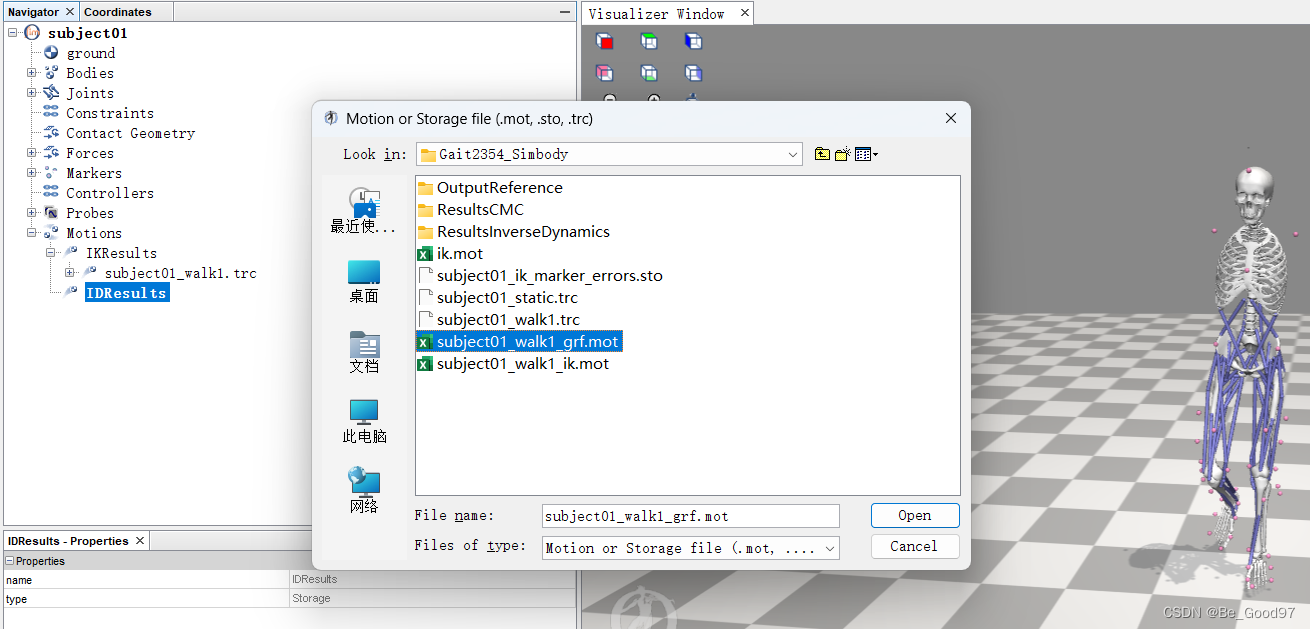
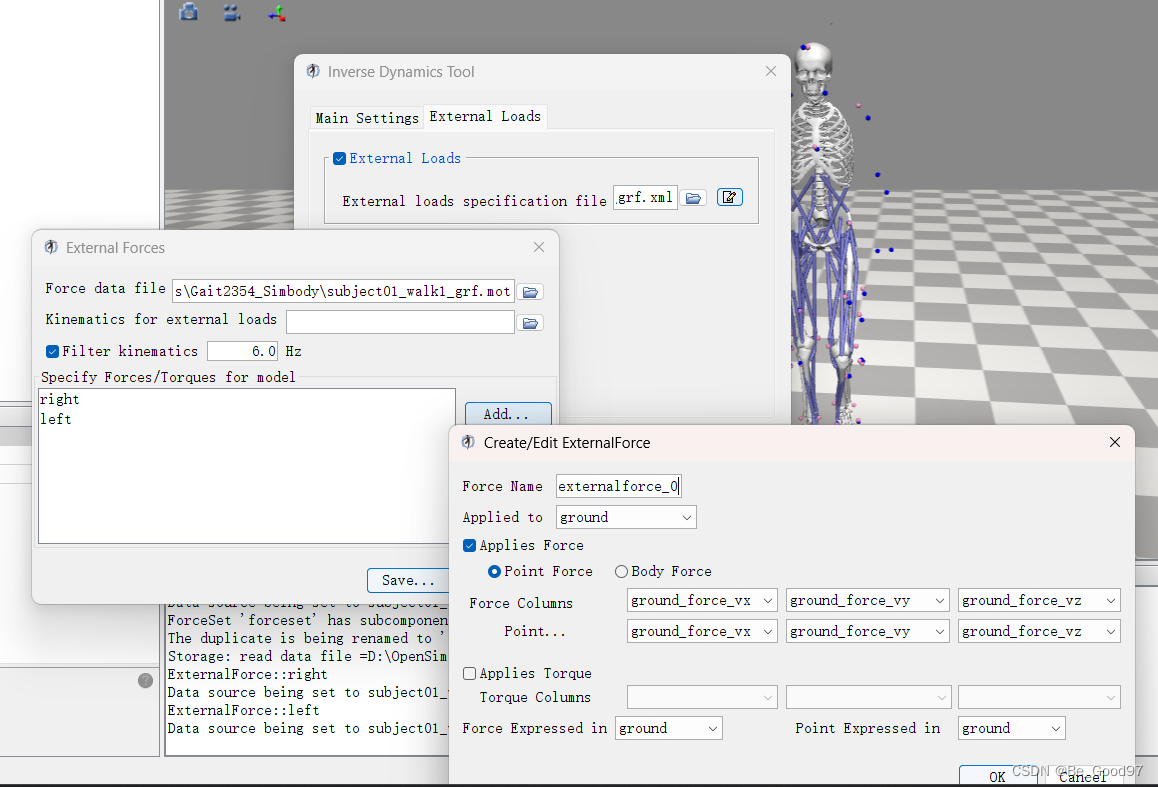
2.添加地面反作用力的文件
3.完成仿真,绘制行走过程中的各个关节力矩曲线
4. Associate Motion Data…→subject01_walk1_grf.mot将仿真结果关联地面反作用力,显示为绿色箭头,在运动过程中也是变化的。
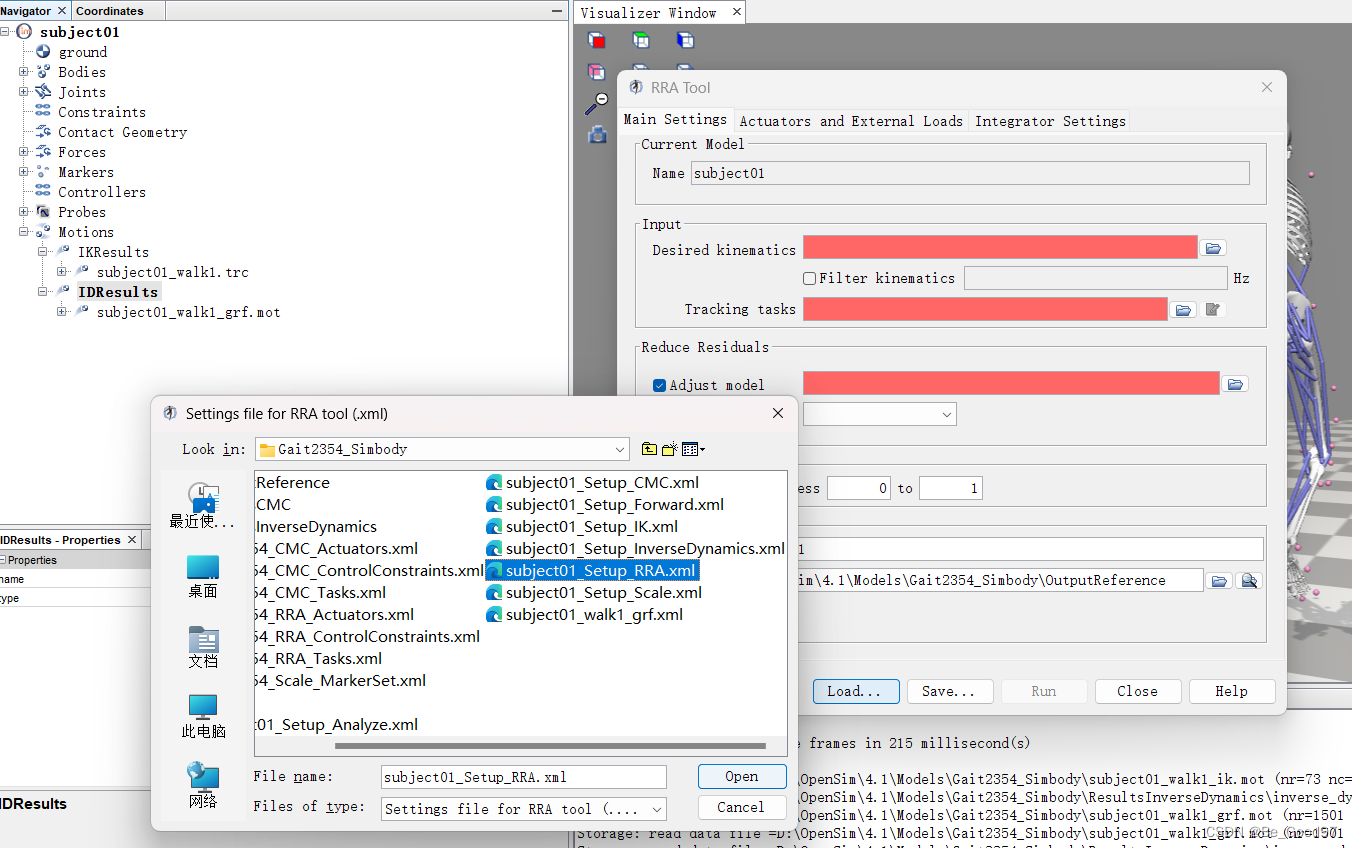
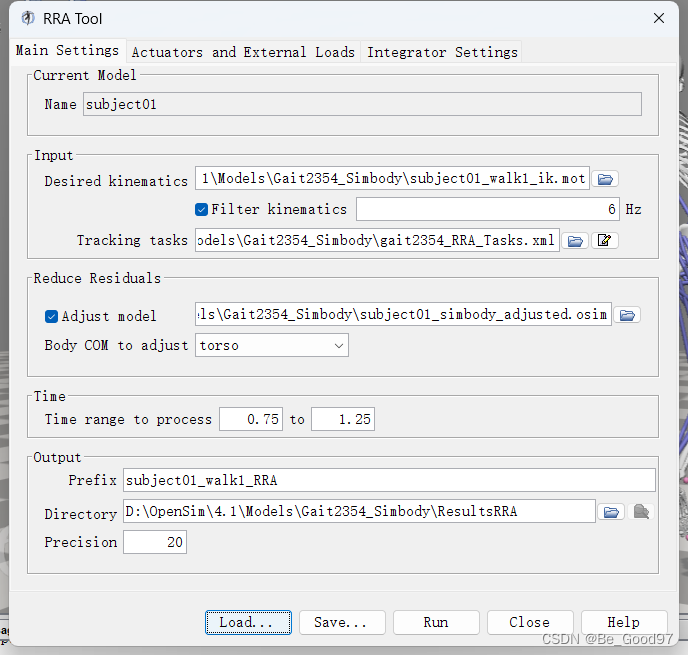
三、残差缩减(RRA)仿真 残差缩减是为了减少建模(如缺少胳膊等)和标记数据处理错误造成的误差。简而言之,残差缩减是给后面的计算机肉控制(CMC)和前向动力学(FD)等步骤打基础,它会再一次的更改模型,“逆运动学”发生变化得到新的运动文件,可以使得后面的仿真结果更加的准确和成功。 1.打开残差缩减(RRA)的设置文件
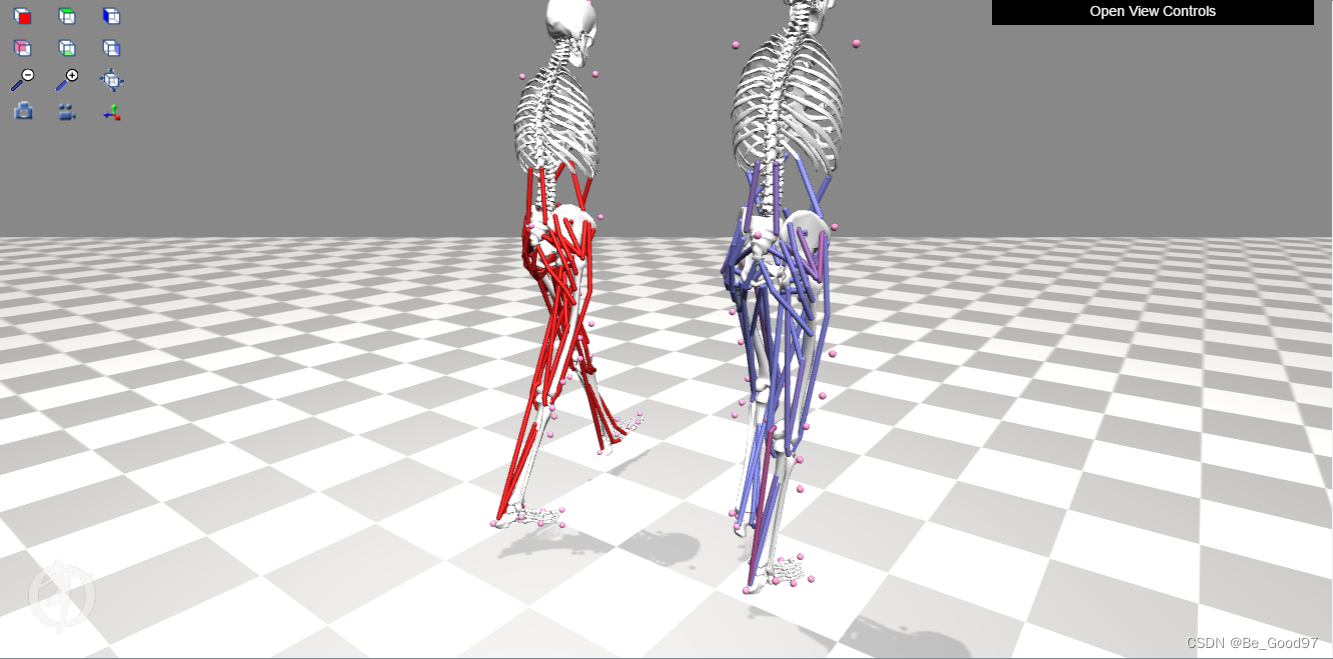
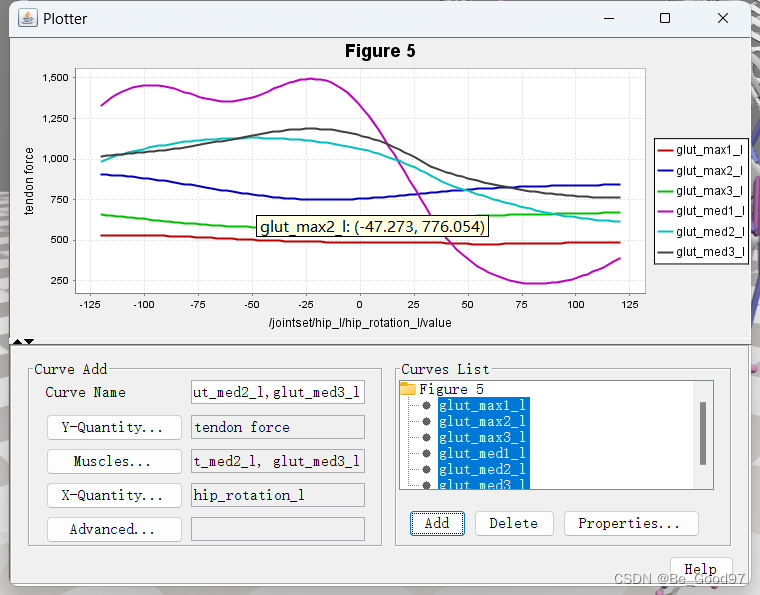
肌肉计算控制的目的是得出不同肌肉在运动过程中的出力大小,可以观察到每块肌肉的激活程度等。运动过程中被激活的肌肉显示为红色。随着肌肉出力由小到大,相应肌肉的颜色由浅及深。
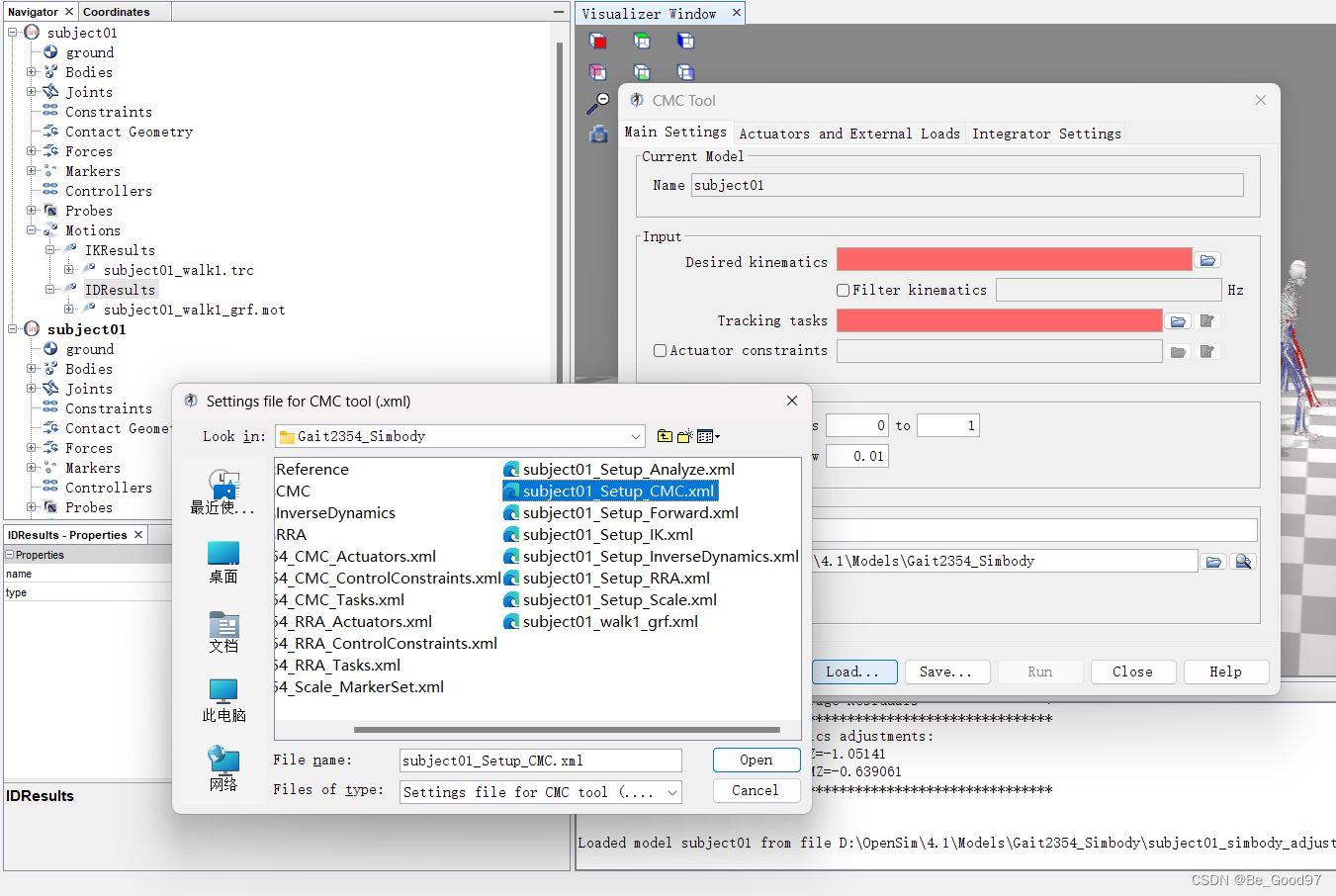
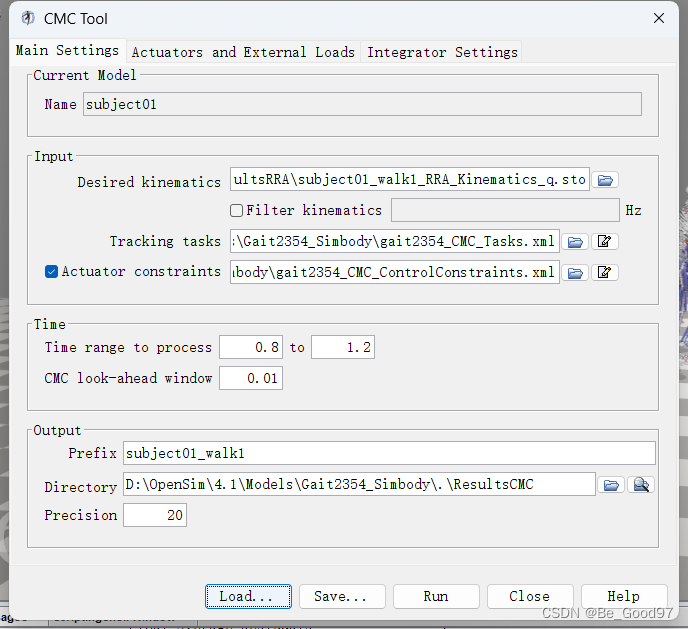
1. 加载计算机肉控制的设置文件CMC\walk_Setup_CMC.xml,
2. Desired kinematics是CMC要复现的运动轨迹;Tracking tasks定义轨迹复现任务中要追踪的坐标;Time range to process设置行走运动的时长。
3.完成仿真,绘制行走过程中的各个肌肉力的变化曲线。
|






【本文地址】