| 线结构光传感器标定(相机标定+结构光标定)完整流程(一) | 您所在的位置:网站首页 › opencv点云消隐 › 线结构光传感器标定(相机标定+结构光标定)完整流程(一) |
线结构光传感器标定(相机标定+结构光标定)完整流程(一)
|
1、使用标定板采集图像20张。 如下图所示: 2、在采集图像过程中,打开线激光条纹,采集两幅不同姿态下的图像 如下图所示: 4、相机内外参数标定 4.1 下载TOOLBOX_calib 放在MATLAB安装目录下的toolbox文件下: 选择standard,出现如下窗口,如图所示: 然后此时提示你输入Basename,Basename就是你的所有图片的名字中相同的部分,例如我将图片统一命名为”Image*“的格式,所以只需在命令行输入Image,然后输入图片格式b。结果如下图所示:
Extraction of the grid corners on the images Number(s) of image(s) to process ([] = all images) = 20 Window size for corner finder (wintx and winty): wintx ([] = 5) = 3 winty ([] = 5) = 3 Window size = 7x7 选择四个角点 |



 3、成功采集两幅带结构光的图像以及20幅不带结构光的图像后,开始相机内参标定。
3、成功采集两幅带结构光的图像以及20幅不带结构光的图像后,开始相机内参标定。 4.2 打开MATLAB 将采集的20幅标定板图像放在D:\MATLAB\toolbox\TOOLBOX_calib目录下,并同意重命名,比如Image1,Image2,…
4.2 打开MATLAB 将采集的20幅标定板图像放在D:\MATLAB\toolbox\TOOLBOX_calib目录下,并同意重命名,比如Image1,Image2,…  4.3 在MATLAB进入相同的目录
4.3 在MATLAB进入相同的目录  4.4 输入命令,calib_gui
4.4 输入命令,calib_gui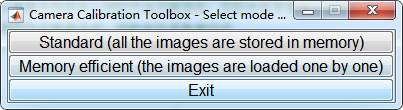 选择Standard(all the images are stored in memory),进去后界面如下:
选择Standard(all the images are stored in memory),进去后界面如下:  进入存放图片的文件夹,点击Read Images,我们可以看到文件夹下的内容。
进入存放图片的文件夹,点击Read Images,我们可以看到文件夹下的内容。 

 点击Extract grid corners,提取每幅图的角点。在命令窗口中,直接按回车键(”Enter“)自动计算棋盘格数目。标定时,依次选取棋盘格的四个角点。
点击Extract grid corners,提取每幅图的角点。在命令窗口中,直接按回车键(”Enter“)自动计算棋盘格数目。标定时,依次选取棋盘格的四个角点。 
 分别在“wintx ([] = 5) =”和“winty ([] = 5) =”输入行中输入角点提取区域的窗口半宽m和半高n。显示角点提取区域的窗口尺寸(2n+1)x(2m+1),例如,选择缺省时角点提取区域的窗口尺寸为11x11像素。
分别在“wintx ([] = 5) =”和“winty ([] = 5) =”输入行中输入角点提取区域的窗口半宽m和半高n。显示角点提取区域的窗口尺寸(2n+1)x(2m+1),例如,选择缺省时角点提取区域的窗口尺寸为11x11像素。
 绘制完20幅图像的角点
绘制完20幅图像的角点  点击Calibration进行校准
点击Calibration进行校准  输出相机的内参数
输出相机的内参数  保存好相机的内参数,还要保存两幅带激光的外参数 其中RC1为第一幅图像相对相机的外参数矩阵的旋转矩阵
保存好相机的内参数,还要保存两幅带激光的外参数 其中RC1为第一幅图像相对相机的外参数矩阵的旋转矩阵  其中RC2为第二幅图像相对相机的外参数矩阵的旋转矩阵
其中RC2为第二幅图像相对相机的外参数矩阵的旋转矩阵  其中TC1为第一幅图像相对相机的外参数矩阵的平移矩阵
其中TC1为第一幅图像相对相机的外参数矩阵的平移矩阵  其中TC2为第二幅图像相对相机的外参数矩阵的平移矩阵
其中TC2为第二幅图像相对相机的外参数矩阵的平移矩阵  至此,获得结构光标定的全部参数。
至此,获得结构光标定的全部参数。【本文地址】