| 计算机组成原理和结构图式(第三章 CPU子系统 | 您所在的位置:网站首页 › not指令流程图 › 计算机组成原理和结构图式(第三章 CPU子系统 |
计算机组成原理和结构图式(第三章 CPU子系统
|
计算机组成原理和结构图式(第三章 CPU子系统—CPU模型的设计)
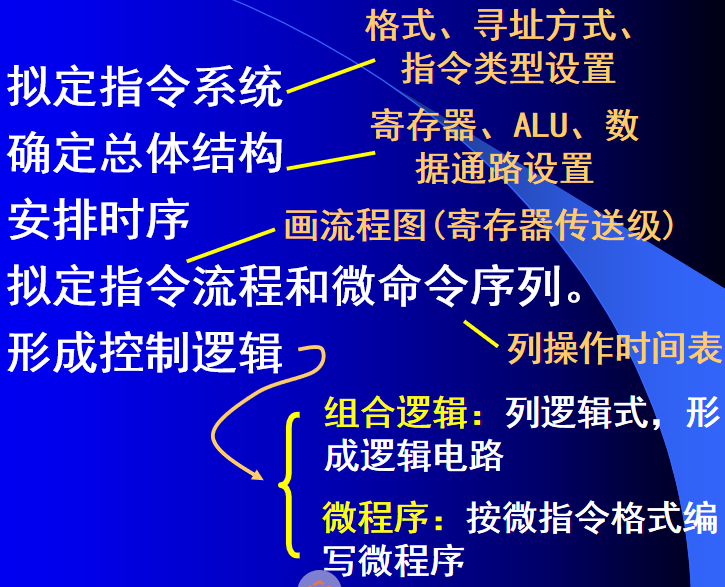
CPU设计步骤
(1)工作周期划分
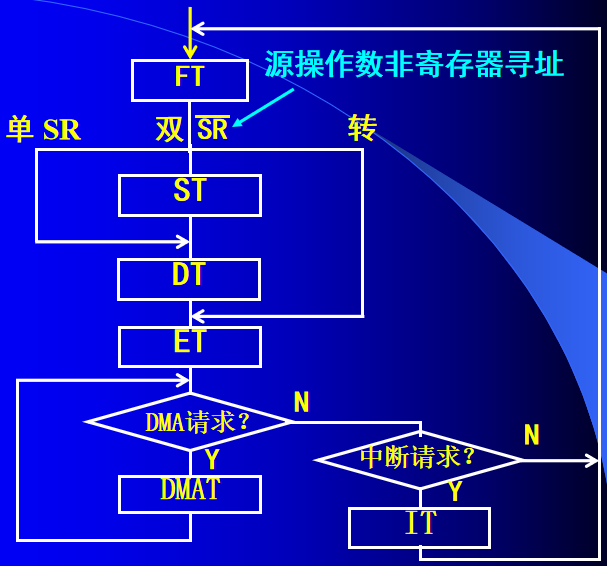
在整个指令周期中,任何时候必须、且只能有一 个工作周期状态标志为“1”。 取指周期(FT) 从M取出指令并译码,修改PC。 ——公共操作取指结束时,按操作码和寻址方式(R/非R寻址) 转相应工作周期。 源周期(ST)按寻址方式(非R寻址)形成源地址,从M取出源操 作数,暂存于C。 目的周期(DT)按寻址方式(非R寻址)形成目的地址,或从M取出 目的操作数,暂存于D。 执行周期(ET)按操作码完成相应操作(传送、运算、取转移地址 送入PC、返回地址压栈保存); 后续指令地址送入MAR。 中断周期(IT)IT指CPU响应中断请求后,到执行中断服务程序前. 关中断、保存断点和PSW、转服务程序入口。 DMA周期(DMAT)DMAT指CPU响应DMA请求后,到完成一次数据传送的时间。 DMA控制器接管总线权,控制数据直传。(由硬件完成)
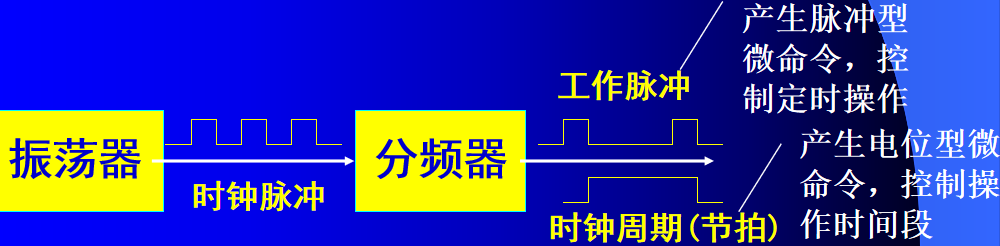
(2)时钟周期(节拍) 灵魂之文1:
⭐⭐⭐⭐⭐ ==》M->MDR->C不可以拆成两个节拍 ==》C->MDR, MDR->M不可以合成两个节拍 设置一个总线周期的长度等于一个时钟周期,可根据需要扩展。 2)时钟周期数:一个工作周期中的时钟数可变。为工作周期划分单位。 用计数器T控制节拍数,将计数值译码,可产生节拍电位。 每个工作周期第一拍 T=0 每开始一个新节拍T计数 工作周期结束时T清零
(3)工作脉冲P 每个时钟周期结束时设置一个脉冲。
二、CPU控制流程
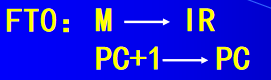
三、指令流程图与操作时间表 拟定指令流程:确定各工作周期中每拍完成的具体操作(寄存器传送级)。 列操作时间表:列出每一步操作所需的微命令及产生条件。 (1)取指周期FT 1)进入FT的方式 初始化时置入FT 程序正常运行时同步打入FT2)流程图
3)操作时间表
灵魂之文2:工作周期中,每拍结束时发CPT;工作周期结束时,5个时序打入命令都发。
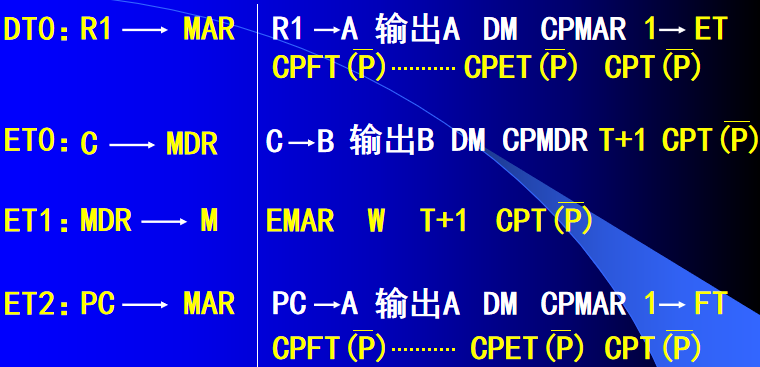
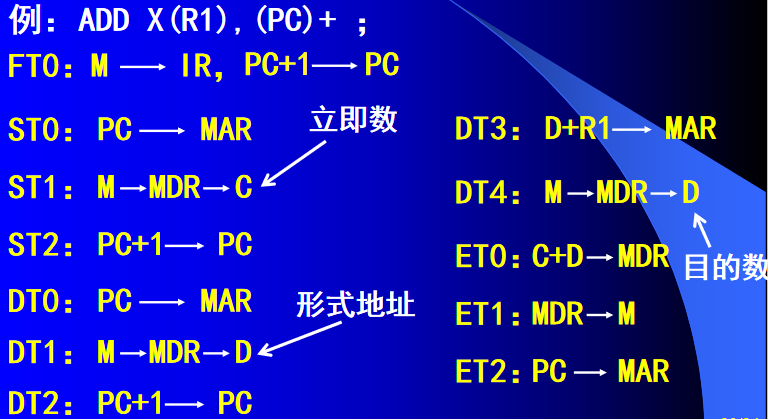
(2)传送指令 1)流程图
易忘:PC—>MAR 2)操作时间表
(3)双操作数指令 取目的数,暂存于D。
(4)单操作数指令 例:COM — (R0)
(5)转移-返回指令
例1:JMP R0;
例2:RST (SP)+;
例3:JMP X(PC);
(5)转子指令 4、控制器原理 (1)组合逻辑控制器原理 1)组合逻辑控制方式的基本思想
综合化简产生微命令的条件,形成逻辑式, 用组合逻辑电路实现; 执行指令时,由组合逻辑电路在相应时间发 出所需微命令,控制有关操作。 2)控制器组成(不用记)
功能:产生全机所需的各种微命令 电位型 脉冲型  指令寄存器IR
功能:存放现行指令
指令寄存器IR
功能:存放现行指令
 状态寄存器PSW
状态寄存器PSW
指示程序运行方式,反映程序运行结果。  (不用记)
时序电路
功能:控制操作时间和操作时刻 (不用记)
时序电路
功能:控制操作时间和操作时刻
3)控制器工作过程 取指令 取数:按寻址方式,或从寄存器取数,或从存储器取数。
执行:按操作码对数据进行运算处理。
取数:按寻址方式,或从寄存器取数,或从存储器取数。
执行:按操作码对数据进行运算处理。
4)组合逻辑控制方式的优缺点及应用 优缺点 产生微命令的速度较快。 设计不规整,设计效率较低; 不易修改、扩展指令系统功能。应用场合:用于高速计算机,或小规模计算机。
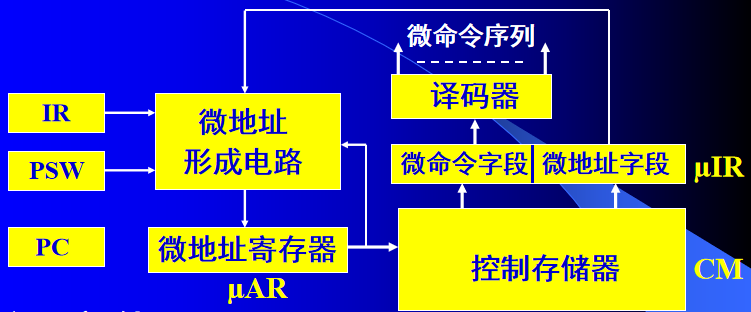
(2)微程序控制器原理 1)基本思想: 一条机器指令(MOV、MAL)对应一段微程序 一段微程序由若干微指令构成 一个(一步)操作(M->MDR->C)对应一条微指令 一条微指令由若干微命令(EMAR、R、STR)组成微程序事先存放在控制存储器中,执行 机器指令时再取出。 2)组成原理
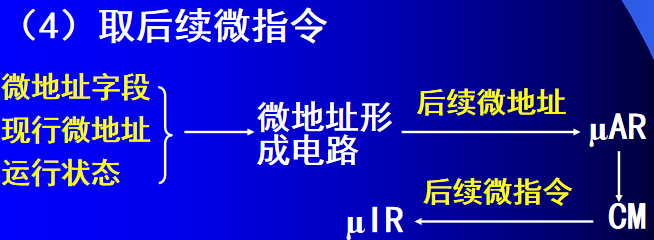
微地址形成电路 功能:提供两类微地址微程序入口地址:由机器指令操作码形成。 后续微地址:由微地址字段、现行微地址、运行状态等形成。 3)工作过程
提去公因式----公共操作 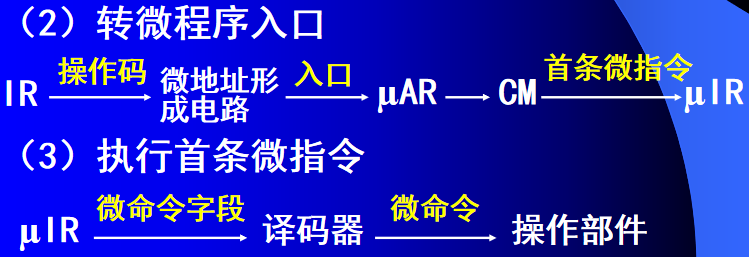
"首条微指令"----实际上是第二条
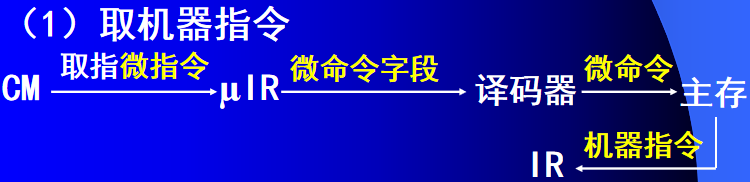
返回----回到公共操作--取址上 微程序执行过程(1) 取机器指令->IR (2) 转微程序入口 取首条微指令到uIR (3) 执行首条微指令 (4) 取后续微指令到uIR (5) 执行后续微指令 (6) 微程序执行完, 返回CM 
4)微程序控制方式优缺点及应用 优点设计规整,设计效率高; 易于修改、扩展指令系统功能;结构规整、简洁,可靠性高; 性价比高。 缺点 速度慢----访存频繁,转移较多执行效率不高----未充分发挥数据 通路本身具有的 并行能力 应用范围 用于速度要求不高、功能较复杂的机器中。 5、微程序控制
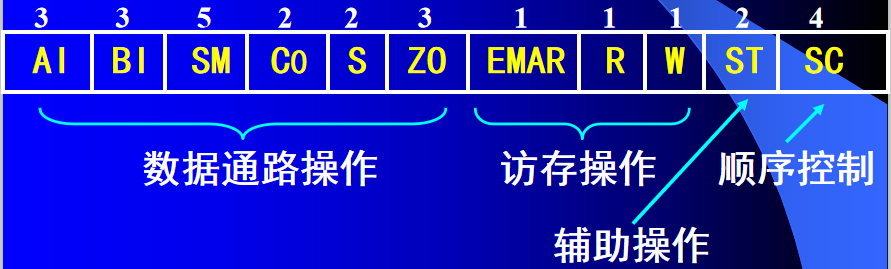
(1)基本原理 微命令的产生方式微程序与机器指令的对应关系 (2)机器指令的微程序实现 查表,根据表的指示取地址和操作 若没有,写......写上一层指令中的下一条指令 目的操作中MOV.DR为寄存器型,MOV.DR非为非寄存器型1.时序系统(了解即可) 2.微指令格式 同类操作中互斥的微命令放同一字段1)格式(格式不计,各字段功能要记)
2)各字段功能 1》数据通路操作 AI(3位):A输入选择 例(自己编):000 R1-》A BI(3位) SM(5位):ALU功能选择 S3S2S1oM S:移位选择 ZO:结果分配 2》访存操作:EMAR、R、W 3》辅助操作 ST 00 无操作 01 开中断 10 关中断 11 SIR4》顺序控制:指明微地址形成方式 SC: 0000 顺序执行(增量) 0001 无条件转移(增量) 0010 按操作码分支(断定) ……(断定) 0111 转微子程序(增量) 1000 返回微主程序(增量)3.微程序编制(不要求)
|











【本文地址】