| 纯电动整车控制器 | 您所在的位置:网站首页 › VCu模型开发 › 纯电动整车控制器 |
纯电动整车控制器
|
开发背景 整车控制开发要求的功能越来越多,特别是乘用车项目,蠕行功能、定速巡航功能等高端功能需要VCU实现控制。另外还有很多复杂的逻辑控制,使用状态机特别好处理。当然以前的C语言也可以做,但是确实没Matlab/Simulink来的更一目了然。而且现在模型开发是大势所趋,使用模型开发的越来越多了。
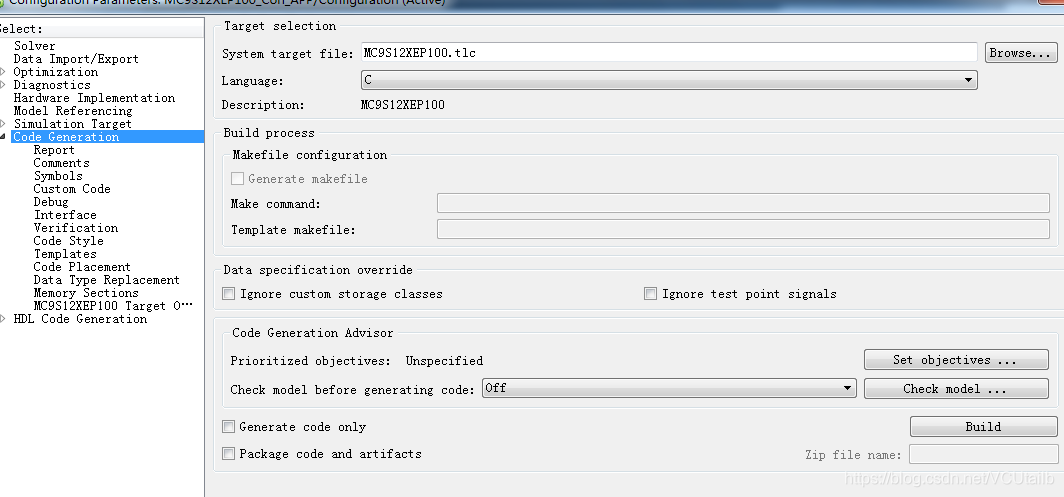
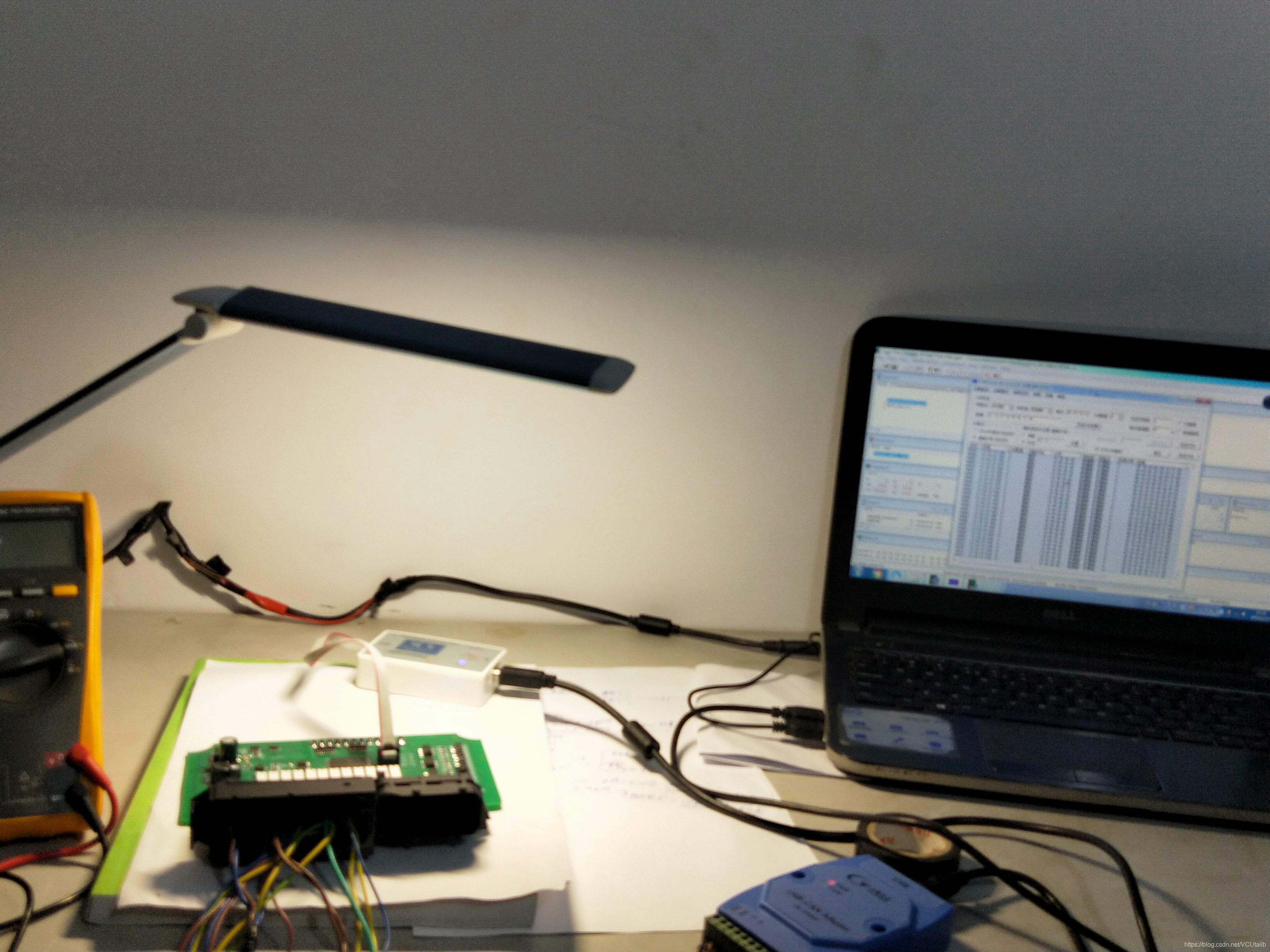
硬件平台 硬件是一款飞思卡尔的MC9S12XEP100为主控的VCU平台,电源8-16V(典型12v乘用车电压平台),另外兼容支持8-32V(商用车24v电压平台);具备充足的开关量采集口、开关量输出口、模拟量采集口、5V电源口、CAN通讯口;
底层驱动 开发好的底层驱动,以模型库的形式添加到simulink中去,直接可以拖曳到工程中使用(类似直接使用simulink自带的模型库),无需对CPU底层了解就可以实现整车的控制,使用特别方便。底层驱动模块代码开源,开发使用C-MEX,使用S-FUN封装,并编写TLC为其提供代码生成。
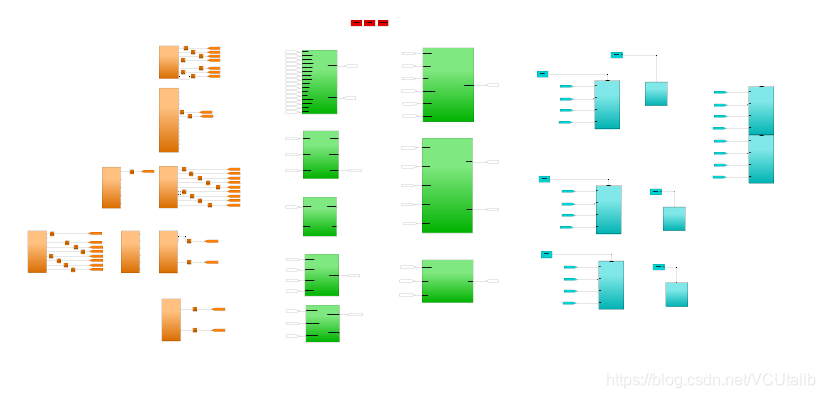
控制策略 在底层模型库的支持下,编写应用控制策略变的如鱼得水。功能主要包括信号采集、信号处理、信号输出。 其中信号采集包含IO、AD、CAN等信号的采集,包含空调、水泵、真空泵、风扇、高压配电、充电机、制动踏板、PEPS、加速踏板、制动踏板、档位开关、巡航开关、回馈开关、运动模式等信号的采集。在信号采集时,输入端进行算法滤波,保证信号的稳定性和处理的可靠性。 信号处理包含开关量信号算法滤波模块、上下电功能模块、电机运行模式判读模块、整车故障分级处理模块、转矩限制模块、转矩油门模块、刹车制动模块、起步蠕行功能模块、定速巡航模块、转矩分配模块等的功能模块。 信号输出包含CAN信息的输出、油门力矩、制动力矩等的信号处理转换还包括仪表显示模块、瞬时能耗计算、冷却管理模块、附件管理模块、VCU自管理。
开发工具 建模采用Matlab/Simulink;CAN通讯仿真及DBC文件使用CANOE;整车动力仿真模型采用PRESCAN;编译下载使用CODEWARRIOR;
开发车型 商用大巴车,续航300KM;整备质量7000KG;电机功率70/110kw; SUV纯电动,续航400-500KM;整备质量1800KG;电机功率50/120kw;
通讯协议 见附件。 部分控制模型
生成代码配置
硬件实物
是否可提供硬件软件 是 |
【本文地址】