| 《STM32 HAL库》GPIO初始化系列函数详尽解析 | 您所在的位置:网站首页 › 简述函数gpio_write › 《STM32 HAL库》GPIO初始化系列函数详尽解析 |
《STM32 HAL库》GPIO初始化系列函数详尽解析
《STM32 HAL库》GPIO初始化系列函数详尽解析
 景皓
分类:嵌入式开发
发布时间 2024.02.28阅读数 1090 评论数 0
景皓
分类:嵌入式开发
发布时间 2024.02.28阅读数 1090 评论数 0
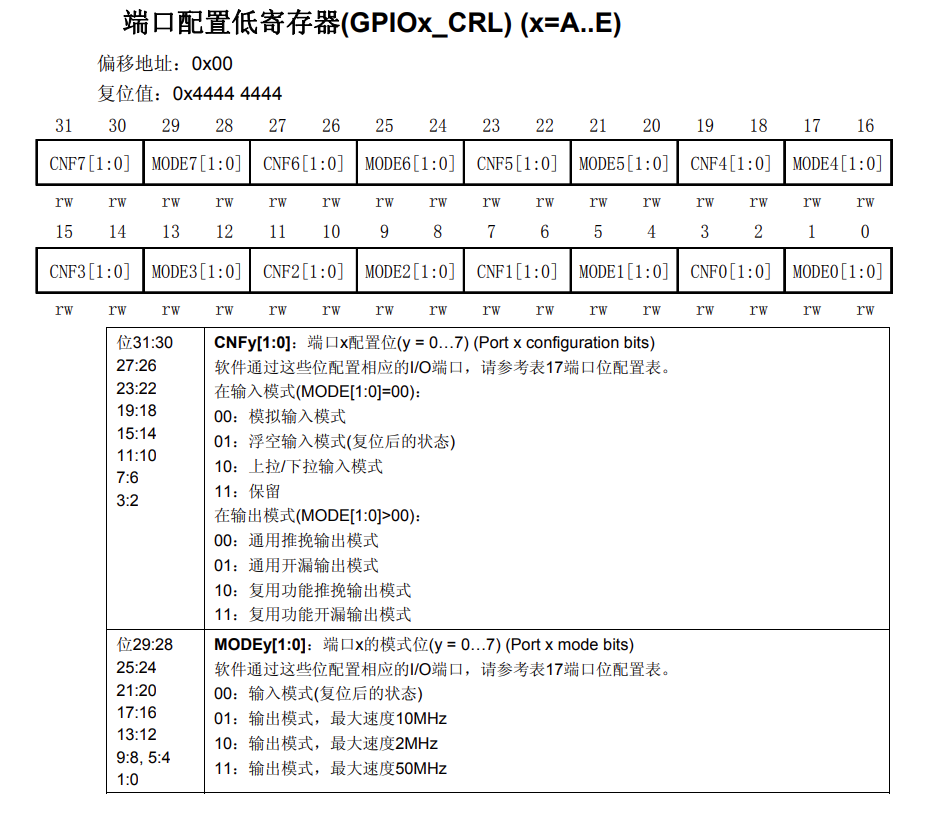
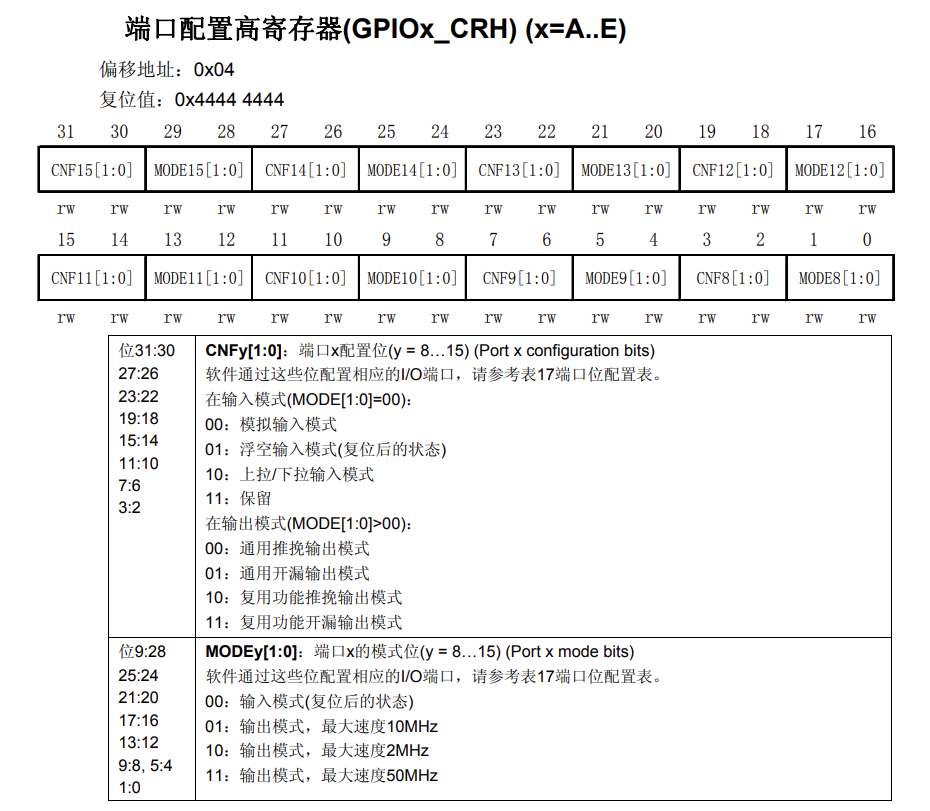
观前提醒:本文详尽分析了HAL库中GPIO配置的相关函数,包括MX_GPIO_Init()、HAL_GPIO_WritePin()、HAL_GPIO_Init()。文末附f1系列GPIO口相关寄存器说明 MX_GPIO_Init()先看源码: void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_SET); /*Configure GPIO pin : PtPin */ GPIO_InitStruct.Pin = LED4_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(LED4_GPIO_Port, &GPIO_InitStruct); }下面我们来逐行分析代码 void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0};这里定义了一个名为 MX_GPIO_Init 的函数,没有输入参数,也没有返回值。同时创建了一个 GPIO_InitTypeDef 类型的结构体变量 GPIO_InitStruct 并初始化为零。 __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE();通过调用 __HAL_RCC_GPIOD_CLK_ENABLE()、__HAL_RCC_GPIOC_CLK_ENABLE() 和 __HAL_RCC_GPIOA_CLK_ENABLE() 函数,使 GPIOD、GPIOC 和 GPIOA 端口的时钟被启用。 HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_SET);这行代码将 LED4_Pin 引脚的输出电平设置为高电平(GPIO_PIN_SET)。它使用了 HAL 库提供的 HAL_GPIO_WritePin 函数。 GPIO_InitStruct.Pin = LED4_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(LED4_GPIO_Port, &GPIO_InitStruct);这几行代码配置了引脚 LED4_Pin 的模式、上下拉和速度。首先,将 LED4_Pin 赋值给 GPIO_InitStruct.Pin,然后将模式设置为输出模式(GPIO_MODE_OUTPUT_PP),无上下拉(GPIO_NOPULL),低速(GPIO_SPEED_FREQ_LOW)。最后,通过调用 HAL_GPIO_Init 函数,将配置应用到 LED4_GPIO_Port 上。 总结一下,以上代码的主要功能是初始化指定的 GPIO 引脚。它启用了相应端口的时钟,设置了一个引脚的输出电平,然后配置了该引脚的模式、上下拉和速度。这样,在调用该函数后,相关的 GPIO 引脚就被正确地初始化,可以进行后续的输入输出操作。有聪明的小伙伴又要问了:为啥上述代码先配置IO口的电平后设置IO口的模式?答:在初始化 IO 口之前,我们需要确保 IO 口的电平是正确的,以避免在切换为输出模式后产生意外的电平变化。如果我们先设置模式再设置电平,会导致在切换为输出模式之前,IO 口的电平发生瞬时变化,从而引起不必要的干扰或错误。 HAL_GPIO_WritePin()Talk is cheap. Show me the code void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState) { /* Check the parameters */ assert_param(IS_GPIO_PIN(GPIO_Pin)); assert_param(IS_GPIO_PIN_ACTION(PinState)); if (PinState != GPIO_PIN_RESET) { GPIOx->BSRR = GPIO_Pin; } else { GPIOx->BSRR = (uint32_t)GPIO_Pin BSRR = GPIO_Pin; } else { GPIOx->BSRR = (uint32_t)GPIO_Pin BSRR 寄存器的对应引脚位置为 1,从而将引脚的输出电平设置为高电平。如果 PinState 等于 GPIO_PIN_RESET,即要设置的输出电平为低电平,那么将 GPIOx->BSRR 寄存器的对应引脚位置为 1(设置引脚为低电平),同时将 GPIOx->BSRR 寄存器的高 16 位位置为 1(清除引脚为高电平),从而将引脚的输出电平设置为低电平。 通过这样的逻辑,根据 PinState 的值,可实现对 GPIO 引脚的输出电平设置。 总结:以上代码实现了 HAL_GPIO_WritePin 函数,用于设置指定 GPIO 引脚的输出电平。通过判断 PinState 的值,将对应的 GPIO 寄存器的位设置为高或低电平,实现了输出电平的设置。 HAL_GPIO_Init()鉴于本函数过长,源码将放置在分析之后,省略了无关紧要的部分 uint32_t position = 0x00u; uint32_t ioposition; uint32_t iocurrent; uint32_t temp; uint32_t config = 0x00u; __IO uint32_t *configregister; uint32_t registeroffset; position:用于追踪当前处理的引脚位置。在循环中递增,以处理下一个引脚。 ioposition:用于获取当前引脚的位位置。通过对 position 进行移位操作得到。 iocurrent:通过将 GPIO_Init->Pin 与 ioposition 进行位与操作,用于检查当前引脚是否需要初始化。如果 iocurrent 等于 ioposition,则说明当前引脚需要初始化。 temp:一个临时变量 config:用于存储引脚的配置值。根据不同的模式和参数,将相应的配置值写入该变量。 configregister:用于存储指向 CRL 或 CRH 寄存器的指针,具体取决于引脚号的范围。在后续的代码中,将使用该指针来修改寄存器的值。 registeroffset:在计算 CNF 和 MODE 位在 CRL 或 CRH 寄存器中的位置时使用的偏移量。 while (((GPIO_Init->Pin) >> position) != 0x00u) { /* Get the IO position */ ioposition = (0x01uL Pin) & ioposition; if (iocurrent == ioposition) { /* Check the Alternate function parameters */ assert_param(IS_GPIO_AF_INSTANCE(GPIOx)); /* Based on the required mode, filling config variable with MODEy[1:0] and CNFy[3:2] corresponding bits */ switch (GPIO_Init->Mode) { /* If we are configuring the pin in OUTPUT push-pull mode */ case GPIO_MODE_OUTPUT_PP: assert_param(IS_GPIO_SPEED(GPIO_Init->Speed)); config = GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_PP; break; ....让我们逐行分析以上代码段: while (((GPIO_Init->Pin) >> position) != 0x00u)这是一个循环的起始。它通过判断 (GPIO_Init->Pin) 右移 position 位后的值是否不等于 0,来确定是否继续执行循环。GPIO_Init->Pin 是一个表示引脚状态的位掩码,通过右移 position 位来检查每个引脚的状态。 ioposition = (0x01uL Pin) & ioposition;这行代码获取当前引脚的状态。它将 GPIO_Init->Pin 强制转换为 uint32_t 类型,然后与 ioposition 进行按位与运算,并将结果存储在 iocurrent 变量中。这样可以判断当前引脚的状态是否为 1。 if (iocurrent == ioposition)这是一个条件语句,用于检查当前引脚是否需要进行初始化配置。如果当前引脚的状态等于 ioposition 的值,即当前引脚的状态为 1,则进入条件判断。 assert_param(IS_GPIO_AF_INSTANCE(GPIOx));这是一个断言宏,用于检查 GPIOx 是否是有效的 GPIO 外设实例。如果 GPIOx 不满足条件,即不是有效的 GPIO 外设实例,则会触发断言错误。 switch (GPIO_Init->Mode)这是一个 switch 语句,根据 GPIO_Init->Mode 的值进行多重分支判断。GPIO_Init->Mode 表示当前引脚的模式。 case GPIO_MODE_OUTPUT_PP: assert_param(IS_GPIO_SPEED(GPIO_Init->Speed)); config = GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_PP; break;这是一个分支语句,用于处理引脚配置为输出推挽模式(GPIO_MODE_OUTPUT_PP)的情况。在这个分支中,会检查GPIO的速度参数,然后根据速度参数和相应的控制寄存器配置值计算出 config 的值。 总结一下:它们共同组成了一段循环结构,用于遍历一组引脚的状态,并根据需要进行初始化配置。在每个循环迭代中,会获取当前引脚的位置和状态,并根据状态进行条件判断和配置操作。 /* Check if the current bit belongs to first half or last half of the pin count number in order to address CRH or CRL register*/ configregister = (iocurrent < GPIO_PIN_8) ? &GPIOx->CRL : &GPIOx->CRH; registeroffset = (iocurrent < GPIO_PIN_8) ? (position Mode & RISING_EDGE) == RISING_EDGE) { SET_BIT(EXTI->RTSR, iocurrent); } else { CLEAR_BIT(EXTI->RTSR, iocurrent); } /* Enable or disable the falling trigger */ if ((GPIO_Init->Mode & FALLING_EDGE) == FALLING_EDGE) { SET_BIT(EXTI->FTSR, iocurrent); } else { CLEAR_BIT(EXTI->FTSR, iocurrent); } /* Configure the event mask */ if ((GPIO_Init->Mode & GPIO_MODE_EVT) == GPIO_MODE_EVT) { SET_BIT(EXTI->EMR, iocurrent); } else { CLEAR_BIT(EXTI->EMR, iocurrent); } /* Configure the interrupt mask */ if ((GPIO_Init->Mode & GPIO_MODE_IT) == GPIO_MODE_IT) { SET_BIT(EXTI->IMR, iocurrent); } else { CLEAR_BIT(EXTI->IMR, iocurrent); } } }这段代码是用于配置GPIO外部中断的相关设置。让我们逐行分析这段代码的功能: 首先,通过判断GPIO_Init->Mode与EXTI_MODE的按位与运算结果是否等于EXTI_MODE,来确定是否需要配置外部中断。EXTI_MODE是一个宏定义,表示外部中断模式。 如果需要配置外部中断,首先使能AFIO(Alternate Function I/O)时钟。AFIO是一个外设,用于管理GPIO的复用功能。 接下来,从AFIO的EXTICR寄存器中读取当前位置对应的值。 根据GPIOx(GPIO端口号)和position(GPIO引脚号)的值,计算出需要设置的值,并将其设置到temp中。 将temp的值写入到AFIO的EXTICR寄存器中,完成对外部中断的配置。 根据GPIO_Init->Mode与RISING_EDGE的按位与运算结果,判断是否需要使能上升沿触发中断。如果需要,设置EXTI的RTSR寄存器中对应的位。 根据GPIO_Init->Mode与FALLING_EDGE的按位与运算结果,判断是否需要使能下降沿触发中断。如果需要,设置EXTI的FTSR寄存器中对应的位。 根据GPIO_Init->Mode与GPIO_MODE_EVT的按位与运算结果,判断是否需要配置事件屏蔽寄存器。如果需要,设置EXTI的EMR寄存器中对应的位。 根据GPIO_Init->Mode与GPIO_MODE_IT的按位与运算结果,判断是否需要配置中断屏蔽寄存器。如果需要,设置EXTI的IMR寄存器中对应的位。 void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init) { uint32_t position = 0x00u; uint32_t ioposition; uint32_t iocurrent; uint32_t temp; uint32_t config = 0x00u; __IO uint32_t *configregister; /* Store the address of CRL or CRH register based on pin number */ uint32_t registeroffset; /* offset used during computation of CNF and MODE bits placement inside CRL or CRH register */ /* Check the parameters */ assert_param(IS_GPIO_ALL_INSTANCE(GPIOx)); assert_param(IS_GPIO_PIN(GPIO_Init->Pin)); assert_param(IS_GPIO_MODE(GPIO_Init->Mode)); /* Configure the port pins */ while (((GPIO_Init->Pin) >> position) != 0x00u) { /* Get the IO position */ ioposition = (0x01uL Pin) & ioposition; if (iocurrent == ioposition) { /* Check the Alternate function parameters */ assert_param(IS_GPIO_AF_INSTANCE(GPIOx)); /* Based on the required mode, filling config variable with MODEy[1:0] and CNFy[3:2] corresponding bits */ switch (GPIO_Init->Mode) { /* If we are configuring the pin in OUTPUT push-pull mode */ case GPIO_MODE_OUTPUT_PP: /* Check the GPIO speed parameter */ assert_param(IS_GPIO_SPEED(GPIO_Init->Speed)); config = GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_PP; break; /* If we are configuring the pin in OUTPUT open-drain mode */ case GPIO_MODE_OUTPUT_OD: /* Check the GPIO speed parameter */ assert_param(IS_GPIO_SPEED(GPIO_Init->Speed)); config = GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_OD; break; /* If we are configuring the pin in ALTERNATE FUNCTION push-pull mode */ case GPIO_MODE_AF_PP: /* Check the GPIO speed parameter */ assert_param(IS_GPIO_SPEED(GPIO_Init->Speed)); config = GPIO_Init->Speed + GPIO_CR_CNF_AF_OUTPUT_PP; break; /* If we are configuring the pin in ALTERNATE FUNCTION open-drain mode */ case GPIO_MODE_AF_OD: /* Check the GPIO speed parameter */ assert_param(IS_GPIO_SPEED(GPIO_Init->Speed)); config = GPIO_Init->Speed + GPIO_CR_CNF_AF_OUTPUT_OD; break; /* If we are configuring the pin in INPUT (also applicable to EVENT and IT mode) */ case GPIO_MODE_INPUT: case GPIO_MODE_IT_RISING: case GPIO_MODE_IT_FALLING: case GPIO_MODE_IT_RISING_FALLING: case GPIO_MODE_EVT_RISING: case GPIO_MODE_EVT_FALLING: case GPIO_MODE_EVT_RISING_FALLING: /* Check the GPIO pull parameter */ assert_param(IS_GPIO_PULL(GPIO_Init->Pull)); if (GPIO_Init->Pull == GPIO_NOPULL) { config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_FLOATING; } else if (GPIO_Init->Pull == GPIO_PULLUP) { config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_PU_PD; /* Set the corresponding ODR bit */ GPIOx->BSRR = ioposition; } else /* GPIO_PULLDOWN */ { config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_INPUT_PU_PD; /* Reset the corresponding ODR bit */ GPIOx->BRR = ioposition; } break; /* If we are configuring the pin in INPUT analog mode */ case GPIO_MODE_ANALOG: config = GPIO_CR_MODE_INPUT + GPIO_CR_CNF_ANALOG; break; /* Parameters are checked with assert_param */ default: break; } /* Check if the current bit belongs to first half or last half of the pin count number in order to address CRH or CRL register*/ configregister = (iocurrent < GPIO_PIN_8) ? &GPIOx->CRL : &GPIOx->CRH; registeroffset = (iocurrent < GPIO_PIN_8) ? (position 2u]; CLEAR_BIT(temp, (0x0Fu) > 2u] = temp; /* Enable or disable the rising trigger */ if ((GPIO_Init->Mode & RISING_EDGE) == RISING_EDGE) { SET_BIT(EXTI->RTSR, iocurrent); } else { CLEAR_BIT(EXTI->RTSR, iocurrent); } /* Enable or disable the falling trigger */ if ((GPIO_Init->Mode & FALLING_EDGE) == FALLING_EDGE) { SET_BIT(EXTI->FTSR, iocurrent); } else { CLEAR_BIT(EXTI->FTSR, iocurrent); } /* Configure the event mask */ if ((GPIO_Init->Mode & GPIO_MODE_EVT) == GPIO_MODE_EVT) { SET_BIT(EXTI->EMR, iocurrent); } else { CLEAR_BIT(EXTI->EMR, iocurrent); } /* Configure the interrupt mask */ if ((GPIO_Init->Mode & GPIO_MODE_IT) == GPIO_MODE_IT) { SET_BIT(EXTI->IMR, iocurrent); } else { CLEAR_BIT(EXTI->IMR, iocurrent); } } } position++; } } GPIO相关寄存器端口配置寄存器 原创文章作者:景皓。如若转载,请注明出处:古月居 https://www.guyuehome.com/46136 打赏 0 点赞 1 收藏 0 分享 微信 微博 QQ 图片 上一篇:《STM32 HAL库》中断相关函数详尽解析——外部中断服务函数 下一篇:《STM32 HAL库》RCC 相关系列函数详尽解析—— HAL_RCC_OscConfig() |
 端口输入数据寄存器
端口输入数据寄存器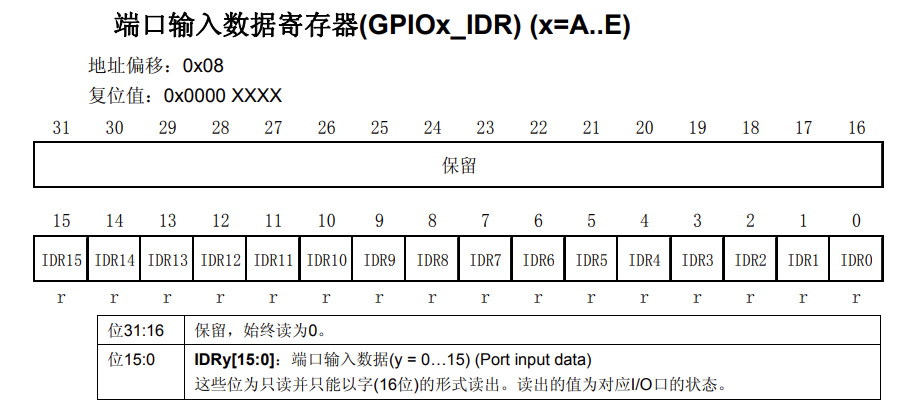 端口输出数据寄存器
端口输出数据寄存器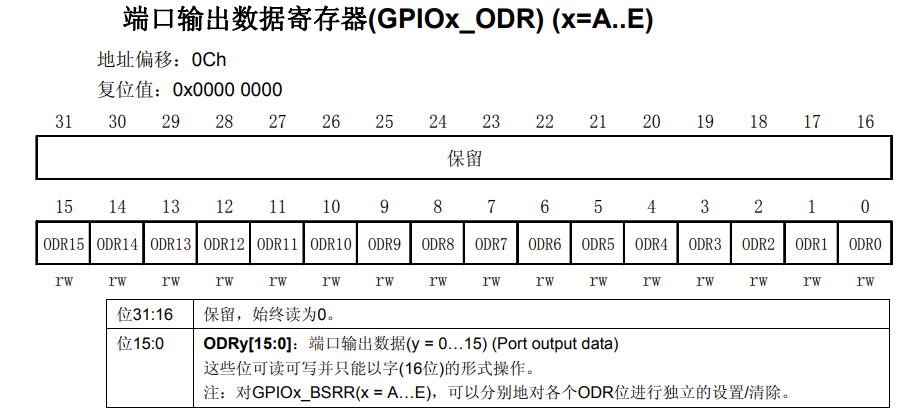 端口位设置/清除寄存器
端口位设置/清除寄存器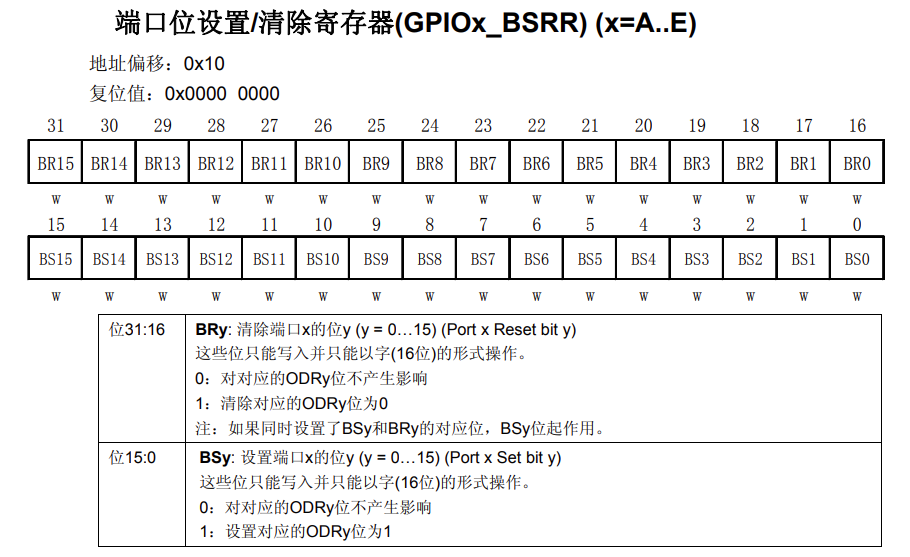 端口位清除寄存器
端口位清除寄存器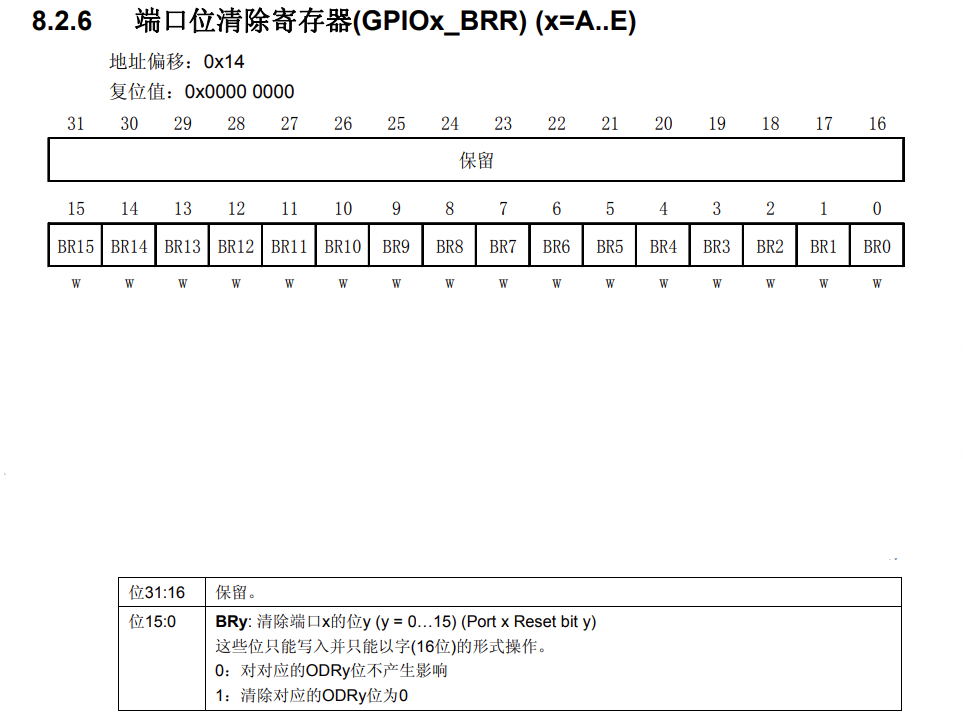 端口配置锁定寄存器
端口配置锁定寄存器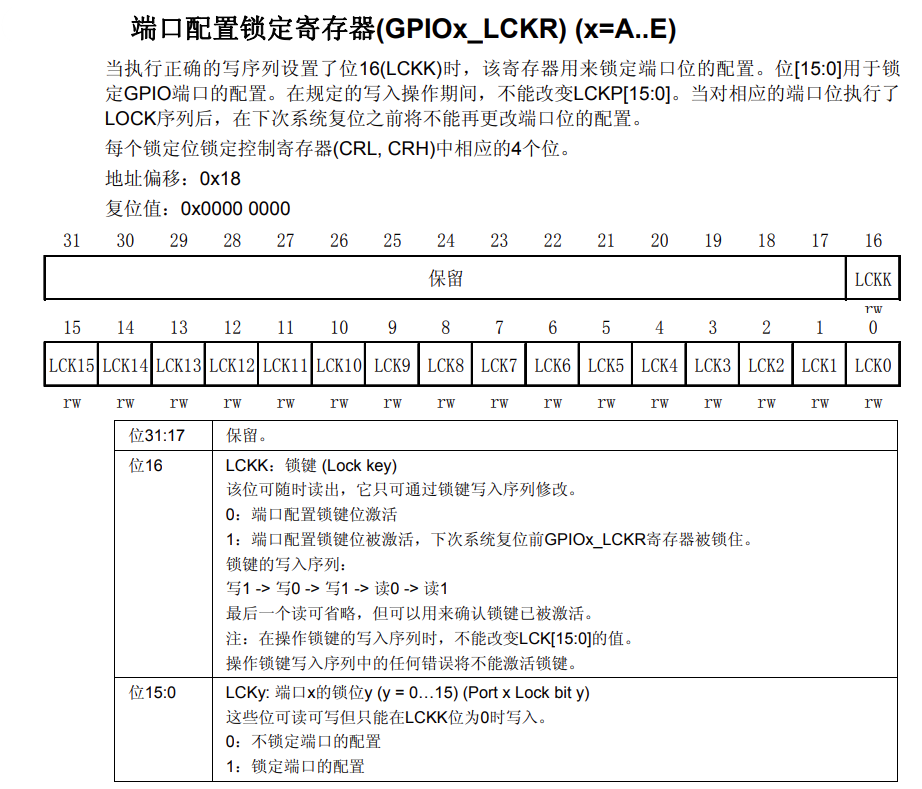
【本文地址】