| 低通滤波器的设计与DSP实现 | 您所在的位置:网站首页 › 一阶低通滤波器设计 › 低通滤波器的设计与DSP实现 |
低通滤波器的设计与DSP实现
|
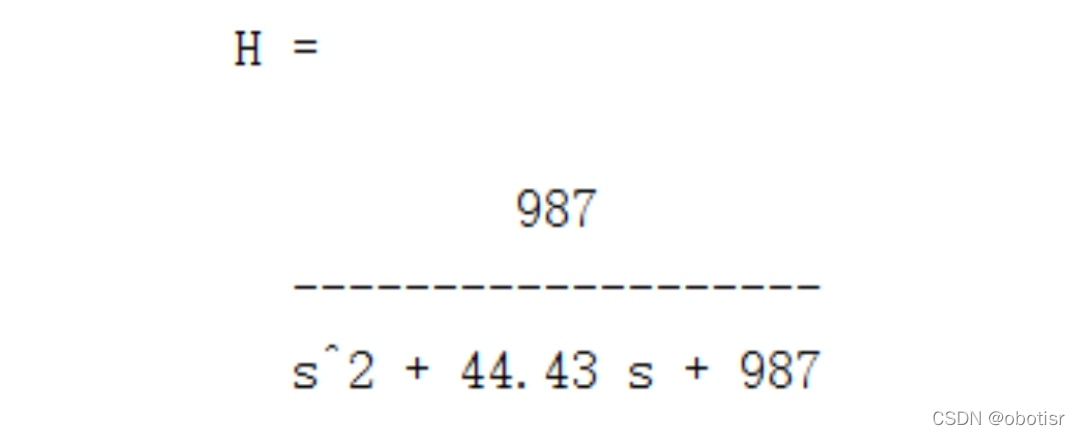
低通滤波器是很常见的工具。比如,在电机控制DSP的AD采样之前,会有大约600Hz的硬件滤波器,用于滤除高频噪声,一般采用两级运放的有源滤波器。再比如,在EQEP的输入信号端口,会有阻容硬件滤波器,用于消除长距信号线可能存在的噪声。在电机控制器内部一般倒是不太会用到滤波器,因为加入低通滤波器有可能造成相位延时,导致控制系统的性能改变。不过,在一些新能源应用和在线监测场景下,还是会用到这个工具,毕竟虽然理论性比较强,但是它实现起来很简单,而且效果明显。 设计目标这篇文章采用例子的形式,来实现一个数字滤波器的设计以及在线应用。设计的过程利用matlab实现,最终推导得到结果后,可以在DSP中实现。参考郑君里的《信号与系统》,现在的数字滤波器都是基于模拟滤波器得到的,而模拟滤波器中最常用的就是巴特沃斯滤波器和切比雪夫I型滤波器。这里的应用场景下,我选择巴特沃斯低通滤波器。 在采样频率2000Hz的情况下,设计一个截止频率为5Hz的2阶数字低通滤波器。这里截止频率即: The cutoff frequency is the frequency at which the magnitude response of the filter is 1 / sqrt(2) = 0.7071 实现过程首先,设计一个模拟滤波器,在matlab中可以使用butter这个函数,这个函数应用很多,这里我采用三个输入参数的形式。 [z,p,k] = butter(2,5*2*pi,'s');其中,第1个参数规定了滤波器的阶数;第2个参数在模拟滤波器设计过程中,是截止频率的弧度形式,即2π倍的频率;第3个参数设为’s’,对应模拟滤波器设计。同时,输出也有很多,这里使用传递函数分子分母的形式,得到如下结果。因为我们关注工程实现,这里不去追问这个结果是如何得到,但是《信号与系统》的书里有的。大概意思是根据截止频率和巴特沃斯滤波器的基本结构进行求解。
在上节中,为了将z函数变化为差分方程,我们推导了2阶的形式,那么3阶呢?高阶呢?从下面可以看到其中的规律,我相信matlab里应该有对应的一般化函数,但是这里我决定自己完善一下上面的例子,于是得到了更为一般化的结果。 对了,补充一点,这里实现的滤波器,应当是属于IIR,即无限冲击响应滤波器范畴。至于FIR,我并没有看懂[doge]。 参考与代码[1] https://www.cnblogs.com/xklzw/p/13439873.html clearvars; clc; close all; % 设计指标 Fs = 2000; order = 3; Wn = 5*2*pi; % 构造目标信号 Ls = 2000; t = (0:1/Fs:1/Fs*(Ls-1))'; signal = 2+0.4*cos(2*pi*50*t)+0.3*cos(2*pi*100*t)+rand(Ls,1); % designs a lowpass analog Butterworth filter [num,den] = butter(order,Wn,'s'); % 模拟传递函数 H = tf(num,den); % 双线性变换 [numd,dend] = bilinear(num,den,Fs); % 数字传递函数 Hd = tf(numd,dend,1/Fs); % 滤波器测试 order阶 b = numd; a = dend; yd = zeros(1,order); ud = zeros(1,order+1); for k=1:1:Ls ud = [signal(k),ud(1:order)]; yd = [1/a(1)*sum(b.*ud) - 1/a(1)*sum(a(2:order+1).*yd) , yd(1:order-1)]; filt_signal(k) = yd(1); end figure(1); plot(t,signal);hold on; grid on;xlabel('Time (s)'); ylabel('Magnitude'); title('Butterworth Low Pass Filter') plot(t,filt_signal,'linewidth',2);hold on; grid on; % figure(2); % P=bodeoptions; % % P.FreqUnits='rad/s'; % P.FreqUnits='Hz'; % P.FreqScale='linear'; % % P.MagScale='log'; % P.MagUnits='abs'; % bode(Hd,P);grid on; |

 下面,要将s函数转化为z函数,一般有两种方法:冲激响应不变法和双线性变换法。由于第1种方法会有高频混叠,实际上最常用的是双线性变换法。利用matlab中的bilinear函数,可以直接得到,免去了代入计算的麻烦,得到如下结果。
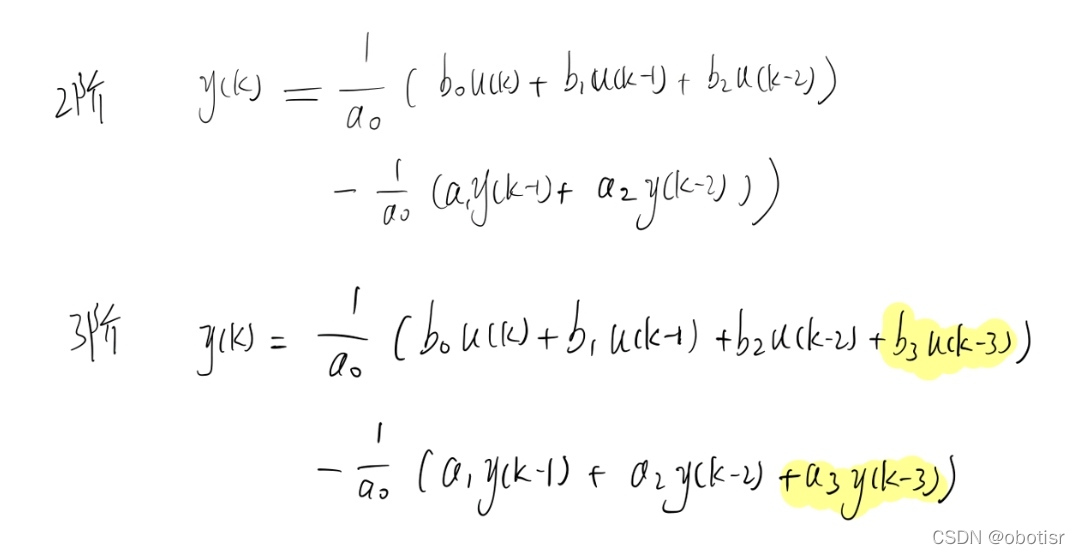
下面,要将s函数转化为z函数,一般有两种方法:冲激响应不变法和双线性变换法。由于第1种方法会有高频混叠,实际上最常用的是双线性变换法。利用matlab中的bilinear函数,可以直接得到,免去了代入计算的麻烦,得到如下结果。 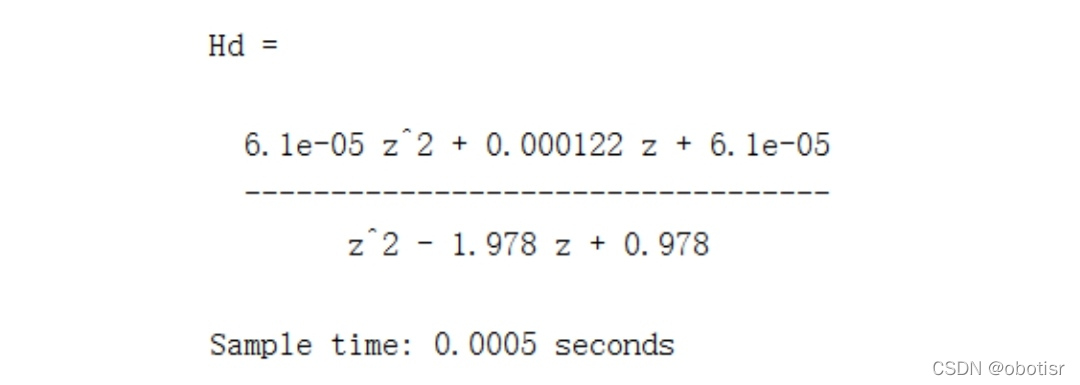 然后,只要把上式变成差分方程就可以在DSP上用了,这部分[1]给了手推公式,这里针对我们的应用,整理一下。
然后,只要把上式变成差分方程就可以在DSP上用了,这部分[1]给了手推公式,这里针对我们的应用,整理一下。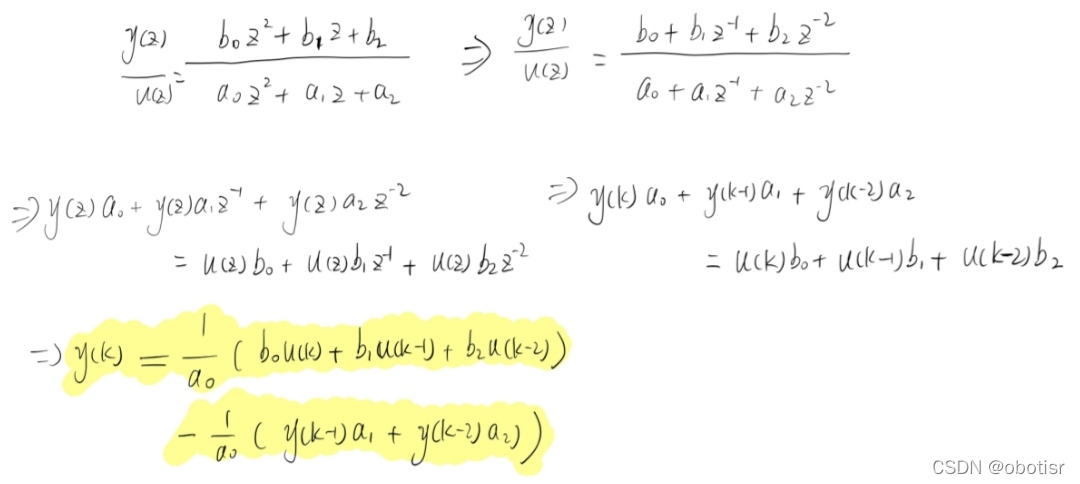 最后,只要实现一下上面的公式,就可以实现在线的低通滤波了。为了方便,这里在m文件中模拟一个在线的过程,构造了一个带噪声的2+0.4cos(2π50t)+0.3cos(2π100t)信号,结果如下。同时还给了离散函数的幅频特性,没错,我不喜欢dB形式的图,我喜欢线性,哈哈哈。
最后,只要实现一下上面的公式,就可以实现在线的低通滤波了。为了方便,这里在m文件中模拟一个在线的过程,构造了一个带噪声的2+0.4cos(2π50t)+0.3cos(2π100t)信号,结果如下。同时还给了离散函数的幅频特性,没错,我不喜欢dB形式的图,我喜欢线性,哈哈哈。 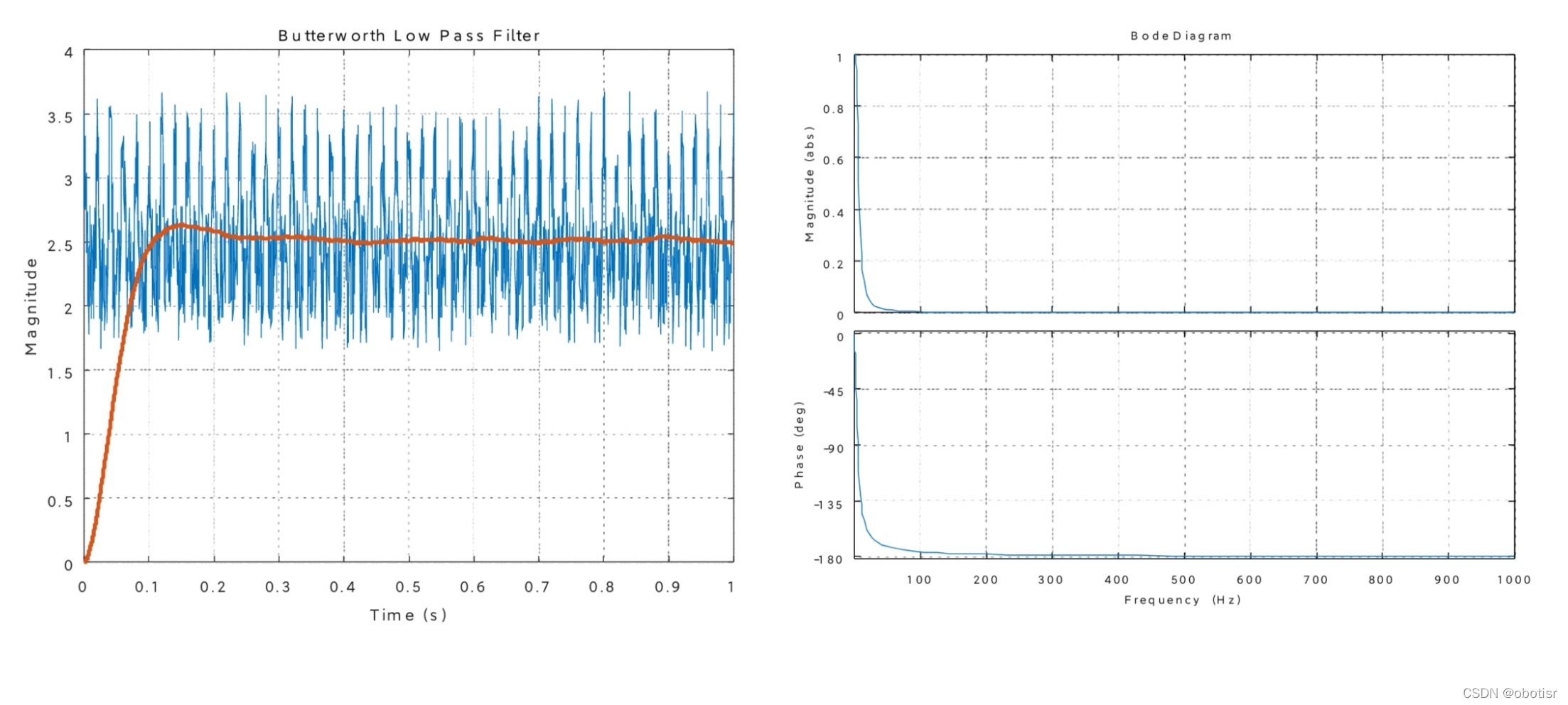
 根据扩展,我们可以得到如下所示的滤波结果。可以看到,随着阶数增加,滤波延时和过冲会增加。但是,并不是意味着阶数可以一直增加,在本例中,8阶情况下,系统会出现不收敛的情况,大概是离散精度之类的问题,这个属于系统系的研究范畴了。
根据扩展,我们可以得到如下所示的滤波结果。可以看到,随着阶数增加,滤波延时和过冲会增加。但是,并不是意味着阶数可以一直增加,在本例中,8阶情况下,系统会出现不收敛的情况,大概是离散精度之类的问题,这个属于系统系的研究范畴了。 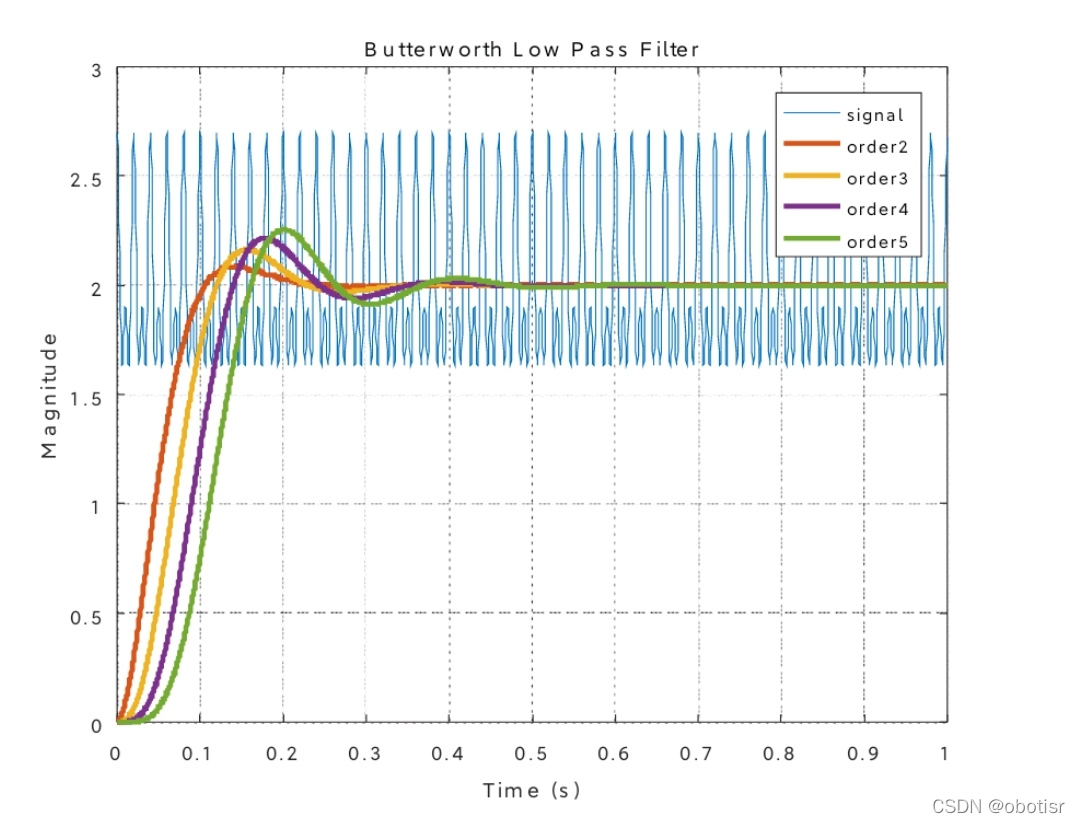
【本文地址】